

十年前(应该说刚开始十一年前)的2009年的12月,Google的自动驾驶汽车计划正式曝光,并引来科技业与汽车业对自动驾驶汽车的大量关注。尽管它也同时惹来大量的争议,但科技领域的大佬,均对自动驾驶均相当乐观,大多认为自动驾驶汽车时代很快就会来临。

Google在2016年构想的无人驾驶汽车,连方向盘都没有。图片来源:PC World。
虎嗅就曾提到:通用宣称2019年投入全自动汽车生产,这些车没有方向盘或不用司机介入;Delphi和MobileEye的Level 4系统也定于2019年;Nutonomy这样的创业公司也计划明年在新加坡街头部署数千辆无人驾驶出租车,而2019年,刚好就是交作业的一年。但最后科技界和汽车业交了什么功课?我们等了十年,连一台商用中的L4级别自动驾驶汽车都没等到。
为什么汽车还是这么笨?现在就等Odin为大家剖释原因。
目前的自动驾驶发展情况
首先,让我们回顾一下目前自动驾驶汽车技术的发展情况。
现在部份全新的市售汽车,已经备有“自动驾驶”功能,这些车子能在巡航时自动转弯和维持行车道,在前方有障碍时减速或停车,或挤塞时自动走走停停等。比较先进一点的自动驾驶汽车呢,更能识别交通灯号和交通标识,从而按交通规则行驶。可是,目前尚未有一台商用级别的自动驾驶汽车,能在完全不经人为干预下,完全“点对点”的把乘客送到目的地。
简言之,目前的“自动驾驶汽车”,仅属“高级辅助驾驶”(Advanced driver-assistance systems, ADAS)功能,远远算不上是“自动驾驶/无人驾驶”。
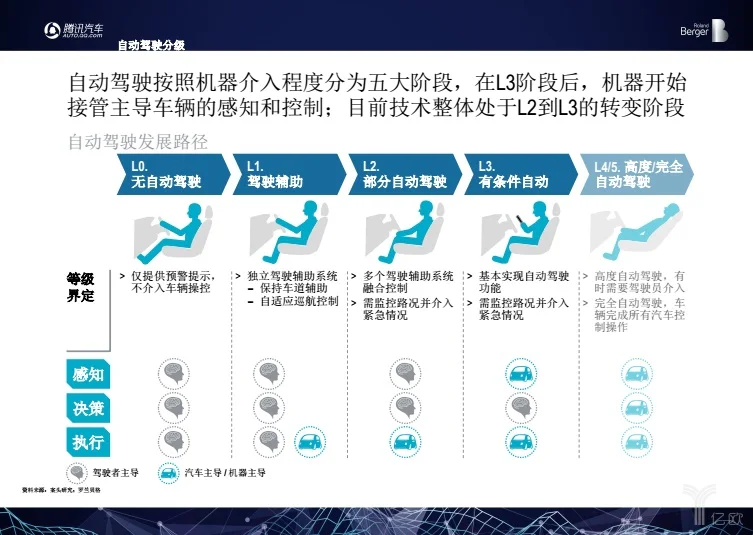
SAE自动驾驶分级表。图片来源:腾讯汽车
根据国际汽车工程师协会(SAE)为自动驾驶制定的5个级别(上图),以目前自动驾驶汽车的水平来说,普遍只能满足L2水平,并努力向L3水平迈进,与最初Google构想中的L4/L5级别的“完全的无人驾驶”(Completely driverless)相差甚远。
科技界和汽车界苦干多年,都是无用功吗?也不全是。

特斯拉目前在使用的“环境感知”方式的自动驾驶。图片来源:特斯拉。
这十年来的自动驾驶汽车,一直都使用“环境感知”和”路径规划”的方式发展。自动驾驶汽车能通过多种视觉传感器,感知四周环境,测量自己与其它物件的距离,并实时生成四周的立体地图,再通过算法确定自己在地图里的位置,规划精确的行车路线,并回避各种障碍。与此同时,相机传感器也可以辨识交通灯、交通标志和道路上的标志线,以作判断汽车的停进和维持行车道之用。
这些技术很难吗?不完全是。从原理上,汽车业这十年来走的路,其实根本与吸尘机器人差别并不太大:大家都使用卷积神经网络进行图像识别、各种深度感知的机器视觉技术、实时定位与地图构建(SLAM)、人工智能规划路径等技术。不少自动化的吸尘机器人,早就能进行自动化的家居清洁服务。
自动驾驶发展的真正难题
那为什么汽车就不能做到?其实汽车要做到完全的自动化驾驶,一点也不困难。
真正的难点,是要让自动动驾驶汽车在不同环境、面对各种突发事故、也能准确无误地安全去到目的地。自动驾驶汽车的场景远比一般家居要为复杂,汽车要面对无常的天气、飘忽的行人、或是多变的路况,更容易出现意料之外的错误。而且,吸尘机器人的“自动驾驶”出意外了,最多就是把墙角叩碰刮花了,但自动驾驶汽车出意外了?不但带来庞大的金钱损失,甚至导致人命伤亡,容错空间更小。
虽然吸尘机器人早就能做到相类似的自动化功能,但汽车所面对的环境,远比吸尘机器人复杂。图片来源:Allen Chen。
汽车厂这十年来所做的,并非“如何实现”自动驾驶,而是“如何把自动驾驶的错误率降到最低”。
科技界和汽车厂为了降低意外的机会,额外为汽车加入多套更先进、更复杂的冗余系统(例如使用双目相机之外,再额外加入更精确的激光雷达),确保一套系统失灵的同时,另一套系统能弥补失误。此外,自动驾驶汽车必须收集更多的测试数据,尽可能把人工智能训练得更精准,所以,无论是Google也好、特斯拉也好、Uber也好,都极力争取多在实际路面测试,以降低意外发生率。
有足够的冗余设计、和足够低的意外率,人们才能放心让自动驾驶汽车在街上行驶。
问题是:自动驾驶汽车十分依赖的人工智能技术,本来就是一个必须不断通过试错(Trial and error)来进行训练的技术,但由于自动驾驶汽车的风险太高,汽车厂难以进行大量测试,来收集实际路面的数据。只要自动驾驶汽车一直沿用吸尘机器人的这一套“环境感知”的老套路,大家就只能慢慢做测试、慢慢收集数据,步履蹒跚着前进。
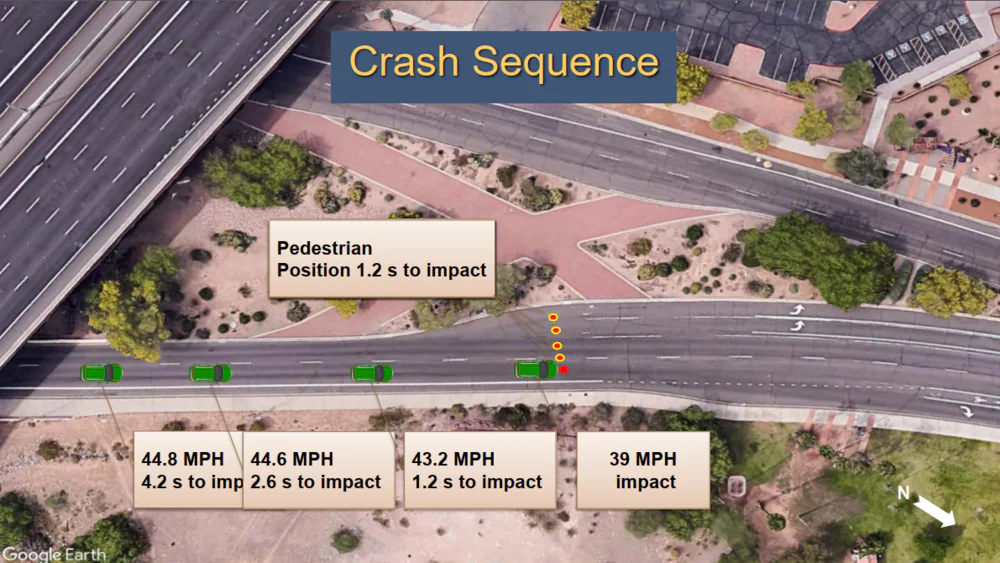
2018年,Uber的自动驾驶汽车涉及人命意外,再引起了坊间对自动驾驶的疑虑。
因为自动驾驶汽车发生的每一次意外,都会让整个技术发展再添更多新的障碍——它可能会引起民众和政府的不信任、也会引起法规进一步收紧,甚至影响相关企业未来的融资。
自动驾驶技术真正方案?
既然原有的感知和规划式的“吸尘机器人”套路不好走,业界没想过用新技术来克服吗?当然是有的,而且他们想得很长远、很完美,但也因为太长远、太完美,所以一直未能实现。
那个技术叫做V2X,Vehicle-to-everything,车联网。

V2X概念图。图片来源:凤凰网。
试想想:如果四周的汽车、路上的街灯、路边的街灯和围栏,都能自己的位置上传,并与汽车坐标比对,而行人也能通过手机分享即时位置,自动驾驶汽车仍然能通过车联网,与四周的坐标精准匹配(上图)。在这情况下,即使当时能见度多差,距离有多远,汽车仍然能掌握附近汽车、行人和障碍物的位置,大幅减少不必要的追尾和切线意外,也懂得自动回避那些乱过马路的行人了。
再想想:只要交通灯和路标拥有联网能力,自动驾驶汽车也自动懂得按着不同的交通指示行驶,大幅减少违规事故。如果建筑物也有联网能力,我们更轻松实现“点对点”的导航。此外,假设汽车进入信号干扰或信号死角区域,导致判断错误,这时我们原有的环境感知技术,就能协助自动驾驶汽车修正相关数据误差,进一步提高安全性。
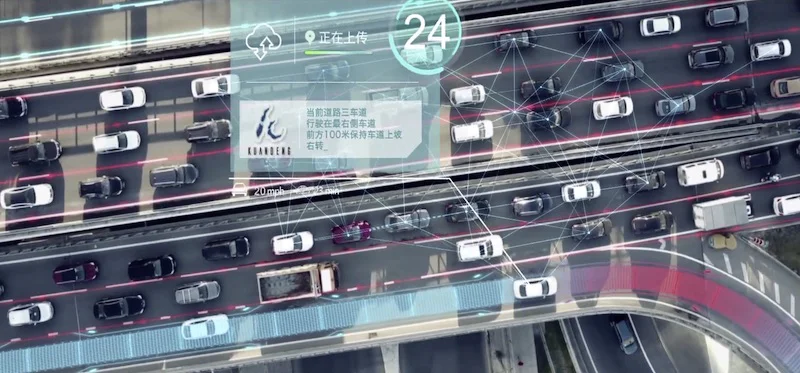
自动驾驶汽车实时更新路况概念图。图片来源:宽凳科技。
我们更可以通过自动驾驶汽车的环境感知技术、生成四周环境的实时立体地图,然后通过车联网实时上传,在云端服务器上与其他用户分享。随后,用户只需要直接在云端更新最新的地图和路况,就能获得最全面的路面资料,轻松解决困扰业界多年的地图采集问题。
自动驾驶与智能城市
车联网技术对于自动驾驶汽车来说虽然重要,但更重要的是,车联网与自动驾驶汽车搭配,是构成21世纪最新、最先进的“智能城市”(Smart City)关键因素之一。
Amazon要通过无人机推动自动化物流系统。图片来源:Amazon(视频经剪辑)
Amazon一直想通过无人机,目的就是为了推动全自动化的城市物流系统(上图),而Uber想通过自动驾驶汽车,也是为了推动自动化的公共交通系统。智能城市需要的,正是这种通过电脑化和万物联网,实现高度自动化的城市管理系统。
Odin曾在2017年在北美车展里,旁听美国快递公司 UPS 的医疗卫生策略总监Wanis Kabbaj的TED Talk。他以生物的血液循环系统为比喻,,解释什么是 “自动驾驶汽车” 的理念。他认为血液的 “交通” 系统,远比人类的交通系统复杂,但人类的交通会堵车,但生物远不会堵车,关键是血液是一种既集体又独立的个体,它会有机地、自动地用尽血管里的空间。
在这个理论下,只要整个城市都通过互联网连接起来,汽车也能成为这种集体又独立的个体,集体式的计算,就能通过控制个别汽车的路线,用尽城市的交通流量。

自动驾效果想像图。图片来源:TED Talk。
我们再想想:汽车通过互联网,就能知道整个城市的人和车的位置和走向,而智能城市的管理系统,就会按照实际交通情况,规划和优化路线和行车速度。为什么自动驾驶汽车,会比人类驾驶汽车更安全?不是因为什么超级电脑或激光雷达,而是因为智能城市里,交通是一套不断自我调整的有机系统。交通系统自动化程度愈高,城市活力就会愈高。
这时候我们不再需要买车,只需使用安排好的共享汽车就能高效地智能出行。我们也不再需要交通灯、死板的车速限制和交通规则,只要有了车联网,自动化交通系统就会完善的规划和调动车流。
为什么业界就不推动这种长远而完美的车联网方案,却偏偏一直重覆吸尘机器人的老套路?因为这条路,更难走。而且,这条路的困难,并不在于自动驾驶技术,而是汽车以外的复杂变数。
更难实现的智能城市
车联网方案对网络质量要求极高,它必须要基于极高响应速度的网络,让云端的指辉系统能在极低延迟下管理和操作汽车,避免因为指令和实际环境出现时差,而导致意外,网络本身也必须能承担海量的机器同时联网,才能让汽车、行人、建筑等不同的设备互相沟通和定位。而且,由于我们需要把海量精准立体地图,经网络上到云端,所以网络也必须有足够的速度,让用户实时获取和反馈信息。
目前5G手机的网络速度,仍不算很理想。图片来源:虎嗅。
简言之,以目前城市的网络水平来说,根本不可能承担这样巨大车联网信息,所以业界一直期待,未来的5G高速网络能实现车联网,藉此让真正的“无人驾驶汽车”出现。
也由于如此,在2019年之前要通过车联网来实现L4或以上级别自动驾驶,根本不可能。不过,我们现在终于等到5G网络开始运作了,这是否就能推动自动驾驶的发展?也不容易。设置5G网络,远比4G要困难,由于要减低难度,而目前全球的5G基站还在使用基于4G核心网的非独立组网(NSA),非独立组网目前欠缺低延时和海量设备连接的能力,所以也无法通过5G实现自动驾驶所需要的车联网能力。
据中国工信部原部长李毅中表示,全国5G网络覆盖还需要6至7年时间。那就是说,到时我们就能通过普及化的5G网络,享受L4级别自动驾驶的便捷服务吗?也不一定是。
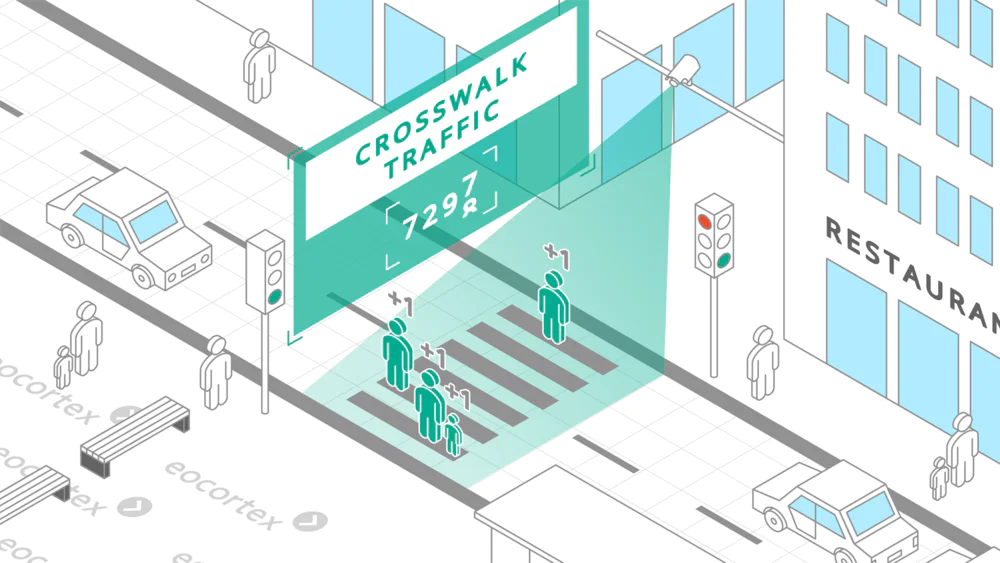
车联网配合自动驾驶汽车,能完美解决交通问题,但也会带来严重的隐私和国防的问题。图片来源:eocortex。
要知道车联网建基于智能城市的万物联网(Internet of Everything),要实现万物联网,市民必须把自己的所有出行数据上传和分享,本来就会构成很严重的隐私问题。而且智能城市只要进行自动化发展,管理系统就会变成与“终结者”(Terminator)里的天网,掌握整个城市的生杀大权。恶徒如果操控了这个“天网”,就能瞬间产生大量交通意外,让城市陷于火海。
真正的自动驾驶汽车,背后还可能涉及隐私、权力和国防问题,企业之间根本难以解决。
自动驾驶汽车,路在何方?
由于通过车联网来实现真正的无人驾驶,需要克服太多与科技无关的的难题,对于科技界也好、汽车企业也好,仍然只能先从能控制的技术上入手,加快汽车的感知和人工智能算法的研究;但在无法掌握的大环境,只能祈求无法掌控的5G和万物联网,能尽快普及。
但单凭汽车企业和科技界、单凭机器视觉、单凭人工智能,要实现完全的自动驾驶,又实在太难了。源自Google的Waymo公司首席执行官John Krafcik就承认,自动驾驶技术还没有达到在任何天气和任何条件下都能驾驶的最高等级L5。因此,虎嗅先前就曾报道,目前大多数L4级公司,开始转做L2与L3级的自动驾驶前装生意,抱车厂大腿,弱化L4业务,甚至大家已经基本不提L4这个词了。
苦等十年,为什么我们的汽车还是这么笨?
因为自动驾驶汽车的路,真的很不容易走。
评论