2016-09-20 09:00

本文来自微信公众号:奇点网(geekheal_com),作者:李盈,虎嗅获授权发表
奇点糕小时候最爱看《西游记》,有时候孙悟空正面打不过妖怪,就会玩点阴招,比如说让自己变小,然后钻进妖怪的肚子里,在里面翻天倒地,让妖怪们疼的哇哇直叫,满地打滚。此招也是屡试不爽,基本上再蛮横的妖怪闹两下也得立马求饶。然而,每当看到这的时候,奇点糕都会默默地觉得自己的肚子有一点疼……

咦,等一下,孙猴子这个「损招」听起来其实和现在大火的「微型机器人」很相似啊,只不过孙猴子是用来「攻击」,而微型机器人则是为了 「治病」。
费曼是纳米技术之父,得过诺贝尔奖,是现代最伟大的理论物理学家之一。但他同时也可能是历史上唯一被按摩院请去画裸体画、偷偷打开放着原子弹机密文件的保险箱,在巴西桑巴乐团担任鼓手的科学家。他曾跟爱因斯坦和波尔等大师讨论物理问题,也曾在赌城跟职业赌徒研究输赢机率。

“可吞下的外科医生”
其实早在1959年,纳米技术的「扛把子」兼「诺贝尔奖得主」兼「最爱恶作剧的科学家」查德·费曼率先提出利用微型机器人治病的想法。他在一次题目为《在物质底层有大量的空间》的演讲中提出:「人类会将纳米级微型机器人用于医疗」,他把这个喻为「可吞下的外科医生」。
自此,用「纳米机器人治病」就一直是科学家们孜孜以求的梦想:「纳米机器人」可以在人体内自由行动,生病了不用吃药,纳米机器人直接「锁定」病毒、消灭病毒;如果必须吃药,纳米机器人可以越过阻塞的动脉或肿瘤直接向靶向器官和部位输送药物,这就避免了常规用药需要穿过身体的整个系统的缺点,这个缺点可能导致药剂过量,并经常伴有恶心、免疫系统减弱等副作用。
甚至一些科学家认为,纳米机器人还能用于治疗癌症、粉碎肾结石等等。总之,纳米机器人被科学家寄予无限美好的期望。
伴随科技发展,这种美好愿景也不再那么遥不可及。2014年。马克斯-普朗克研究所(Max Planck Institute,MPI)推出的能够在血液、眼球液以及其他体液中游泳移动的扇贝微型机器人。
2016年,麻省理工学院联合慕尼黑工业大学将传统折纸艺术和现代科技结合,推出了一款微型折纸机器人,这款机器人能跑、能游泳、还能运东西,并且能在丙酮里彻底溶解。
折纸机器人
世界上首个超微型纤毛机器
在今年8月份,大邱庆北科学技术院(Daegu Gyeongbuk Institute of Science and Technology)的机器人工程系的韩国科学家发明出世界上首个超微型纤毛机器人,它能够依靠磁力在人体的血液中游动,速度之快令人惊讶。

(a)微生物草履虫用纤毛运动的SEM图像。
(b)人工纤毛微型机器人设计图
(c)用3D激光蚀刻和金属溅射制作纤毛微型机器人的全过程
(d)大邱庆北科学技术院研究团队开发的纤毛运动微型机器人SEM图像(3D视图,比例尺=100μm).
(e)大邱庆北科学技术院研究团队开发的纤毛运动微型机器人SEM图像(顶视图,比例尺=100μm)
对于微型机器人来说,「供能问题」是首要问题,毕竟想要治病,得让机器人动起来才行。但是在血液这种密度大于水的液体中,物体运动的惯性较小,相对阻力较高,宏观世界船只和潜艇运用的推进系统就很没效率,于是大邱庆北科学技术院的科学家们把目光转向了微观世界——诸如草履虫或细菌等微生物是怎么运动的?
世界首个微型纤毛机器人的运动视频
大邱庆北科学技术院的科学家决定将「草履虫」的运动模式用于微型机器人的仿生设计。
首先,利用3D激光蚀刻制造微型机器人身体——主体是椭圆形,主体的两侧各有4根纤毛,一共8根纤毛;
其次,在8根纤毛上采用金属镀膜技术,覆上镍钛双重涂层来确保可以靠磁驱动;
最后,这个人造纤毛机器人的运动由外部加强磁场操控,在磁场的作用下,通过模仿草履虫纤毛的非对称互换运动来制造出一个「净推力」,从而「复制」草履虫的运动模式。
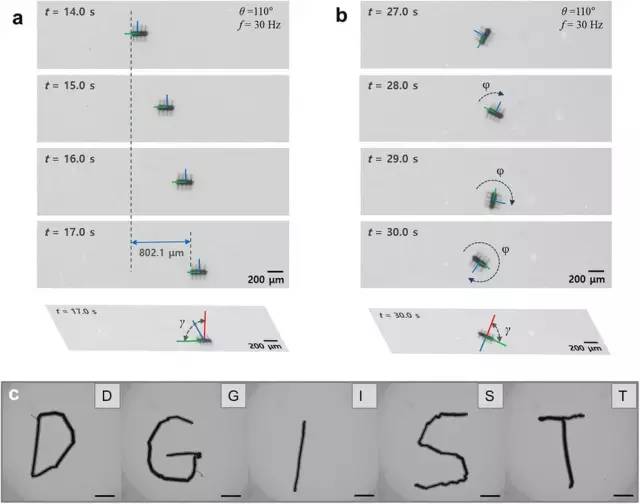
(a)磁场作用下,由往复式磁力驱动产生的纤毛微型机器人线性运动截图
(b)磁场作用下,由往复式磁力轴旋转产生的纤毛微型机器人的旋转运动截图
(c)纤毛微型机器人沿字母 D. G. I. S. T.轨迹运行
总体来说,这款微型纤毛机器人长220微米,高60微米,每根纤毛长75微米,最大速度为340微米每秒,在磁力驱动下,这种微型机器人比传统微型机器人的速度快8倍,具有高机动性。

图为微型机器人的运动原理说明
那如何操控微型机器人运动的速度和方向?
这款微型纤毛机器人的运动是由8个线圈的电磁制动器操作的,这种半球状的电磁系统可以让微型机器人运动方向转变角度,范围为0-110°(实际上不能达到110°)。因为纤毛与所施加的磁场方向运动方向一致,所以磁场的非对称切换可以让纤毛以非轴对称驱动力运动。并且微型机器人体内的转向轴也可以控制微型机器人的运动方向,因此可以精准地控制微型机器人的方向。而微型机器人的移动速度可以通过外部加强电磁场的强度和频率来控制。
作为世界首个「纤毛微型机器人」,它被设计用来靶向运输微颗粒,也就是说它能够在血液中朝着特定的病灶运输药物颗粒。
但是,要实现这一「目标」还要让微型机器人具有「生物相容性」。对于用于体内的微型机器人来说,机器人在完成「送药」任务之后,最理想的状态应该是在体内完全溶解,不会产生毒素。对于大邱庆北科学技术院研发的微型纤毛机器人来说,仅在纤毛处覆盖镍钛双重涂层,所以金属含量非常少。
然而,团队领导者Hongsoo Choi表示这个微型纤毛机器人可能需要在体内以及体外环境中进行长期的生物相容性或毒性试验,来进一步确认微型机器人是否适用于在体内的生物医学应用。「我们将会继续研究能在体内有效运动的微型机器人,在未来它们能够用于药物的输送和进行无创手术」,Hongsoo Choi说。
参考文献:
【1】Sangwon Kim, Seungmin Lee, Jeonghun Lee, Bradley J. Nelson, Li Zhang & Hongsoo Choi.Fabrication and Manipulation of Ciliary Microrobots with Non-reciprocal Magnetic Actuation.Scientific Reports 6, Article number: 30713 (2016)
【2】http://newatlas.com/paramecium-inspired-microrobots/45391/pictures
如需转载请联系微信公众号:微信公众号:奇点网(geekheal_com)。
本内容由作者授权发布,观点仅代表作者本人,不代表虎嗅立场。
如对本稿件有异议或投诉,请联系 tougao@huxiu.com。
如对本稿件有异议或投诉,请联系 tougao@huxiu.com。
频道: 健康