#想法
2018-07-09 13:30虎嗅注:如果你关注自动驾驶领域的动态,可能很多时候会在文章中看到或者在某些场合听到 SLAM 技术。那么这个 SLAM 技术到底是什么?它和自动驾驶又有什么关系?它核心任务又是什么?
以下是视频文字稿:
 SLAM 的中文名叫“同时定位与地图构建”,是帮助机器在进入一个陌生环境时,通过移动和观察快速了解周围环境,并绘制出环境地图的技术。
SLAM 的中文名叫“同时定位与地图构建”,是帮助机器在进入一个陌生环境时,通过移动和观察快速了解周围环境,并绘制出环境地图的技术。
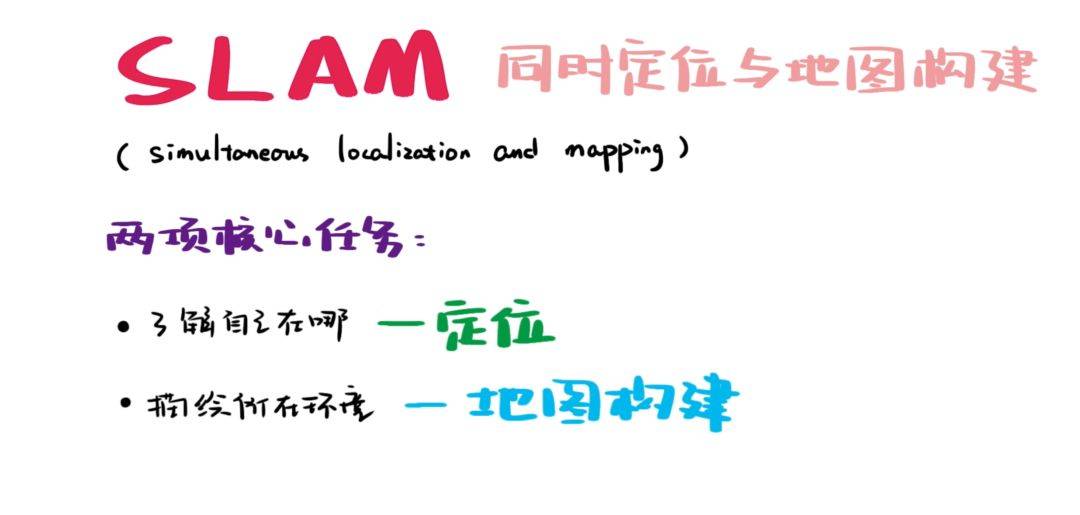
从名字也能看出,SLAM 包含两项核心任务:了解自己在哪儿,即定位 (Localization);描绘自己所在的空间,即地图构建 (Mapping)。
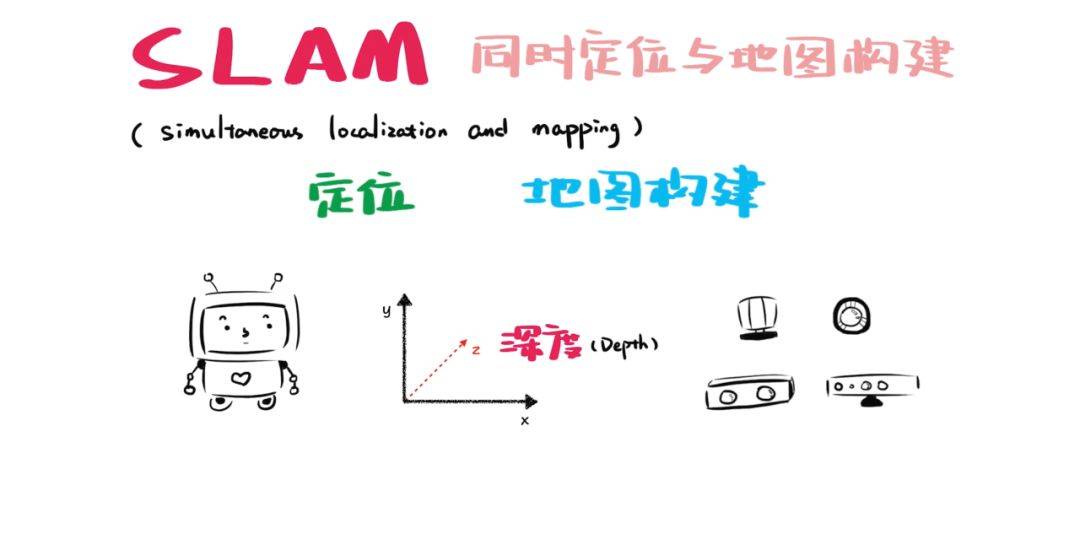
这两个任务需要机器对环境有三维感知,因此深度信息相当重要。为机器充当眼睛的一般是激光雷达、单目/双目相机或是 RGB-D 深度相机。
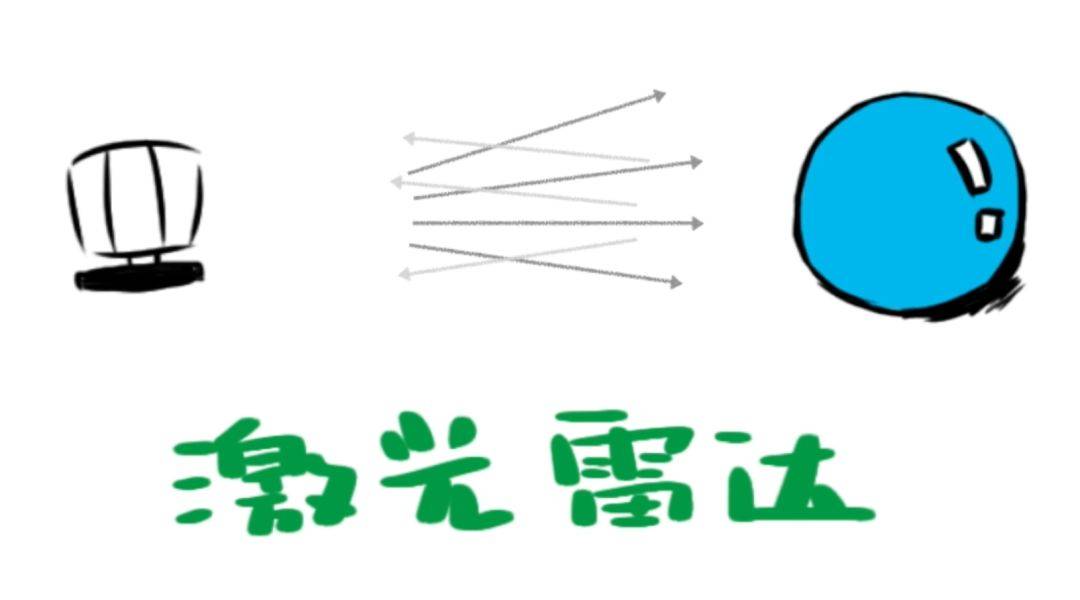
激光雷达通过发射和接受反射回来的激光束,获得距离、速度等信息;
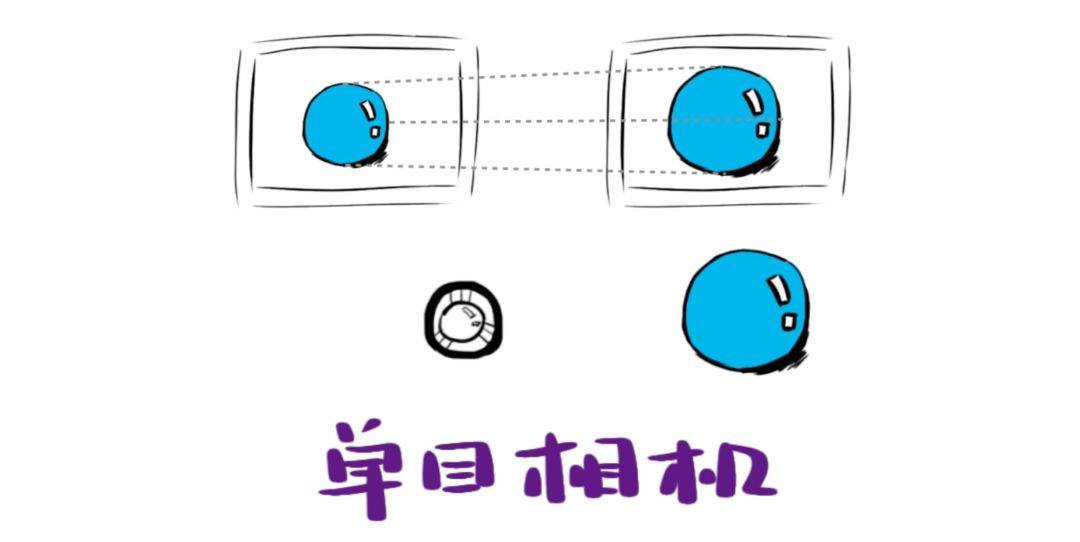
单目摄像头需要对比机器在移动过程中拍摄到的图像变化,来判断与物体之间的距离;
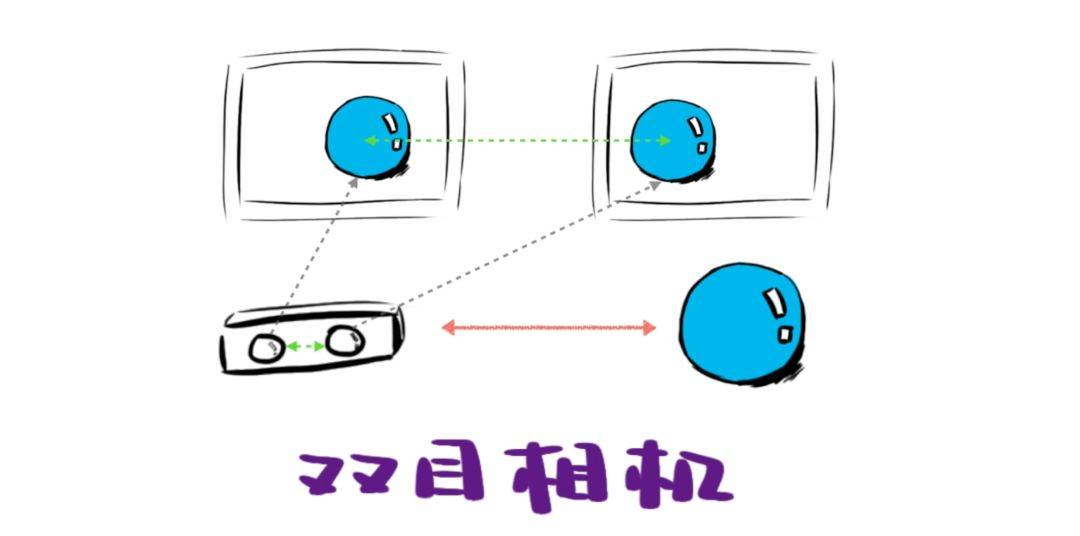
双目摄像头更像人眼,可以通过两只眼睛看到图像的不同,直接获取深度信息;
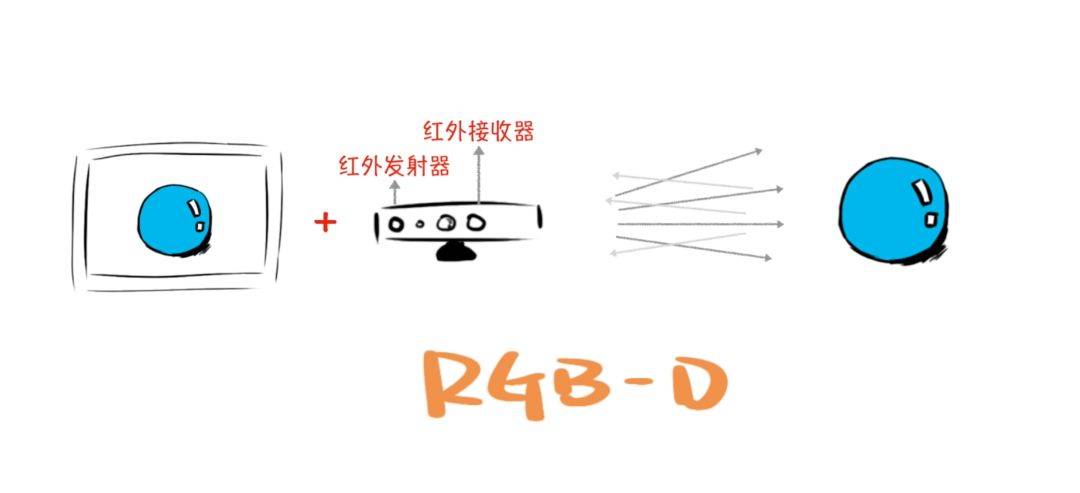
RGB-D 由于配备了红外发射器和接收器,利用结构光就能直接获得周围环境的深度信息,我们也将它称为深度相机。
不了解结构光的同学,可以回到上一期 Face ID 识别原理部分复习一下。

有了周围环境的图像和深度信息,机器就能一边移动一边将这些图像拼接起来,绘制出环境地图,以便更好的移动或是完成更复杂的任务。
如果只有这么简单,人们为什么会在这个课题上花费超过三十年时间?
内容为转载
本内容由作者授权发布,观点仅代表作者本人,不代表虎嗅立场。
如对本稿件有异议或投诉,请联系 tougao@huxiu.com。
如对本稿件有异议或投诉,请联系 tougao@huxiu.com。