




2023-10-17 17:38

扫码打开虎嗅APP


本文来自微信公众号:中国航天(ID:zght-caecc),作者:高朝阳、邵艳利、康晓晰、张天馨、郭翔(探月与航天工程中心),原文标题:《“月船”3任务详解及启示》,题图来自:视觉中国
“月船”3(Chandrayaan-3)是印度空间研究组织(ISRO)的第3次月球探测任务。印度标准时间2023年7月14日14时35分,“月船”3由LVM3运载火箭发射升空。“月船”3的“维克拉姆”着陆器于2023年8月23日在月球近南极地区成功实现软着陆,并成功释放“智慧”月球车。自此,印度成为继苏联、美国和中国之后第4个成功实现月面软着陆的国家,也是首个在月球近南极地区成功着陆的国家。
一、任务背景
1999年,印度科学院第一次提出了月球探测的设想。经过论证,2003年,印度政府正式批准了“月船”1任务。“月船”1于2008年10月22日发射,11月12日进入高度100km的绕月圆轨道。由于对距离月面100km高度的热环境估计不足,“月船”1探测器过热进而导致星敏感器失效,最终于2009年8月29日与地面失去联络。
“月船”1在轨工作312天,绕月运行超过3400圈,在此期间利用地形测绘相机等各类遥感载荷对月面进行了详细勘察。2019年7月22日,“月船”2发射,探测器于9月1日进入119km×127km的月球轨道。9月7日,“月船”2着陆器在进行月面软着陆过程中因软件故障导致其发生姿态翻转(见图1),最终坠毁于月球南纬70.881°、东经22.784°处,落月任务失败。

图1 “月船”2着陆姿态翻转
“月船”3是“月船”1和“月船”2的后续任务。尽管“月船”2着陆器落月失利,但至今其轨道器仍在轨运行,所搭载的高分辨率相机可提供0.3m分辨率的成像数据,这为“月船”3着陆任务提供了详尽的地形地貌勘测资料。同时,“月船”2轨道器在 “月船”3任务中还提供应急中继通信功能。
2020年1月,印度空间研究组织宣布启动“月船”3任务。“月船”3的整体构型与“月船”2类似,由着陆器模块、推进模块和月球车构成,如图2所示。月球车以印度“航天之父”维克拉姆·萨拉巴伊的名字命名。“月船”3原计划于2021年发射,由于疫情影响,延迟到2023年发射。“月船”3的设计寿命为1个月昼(相当于地球上2周左右),其主要任务是对极区月壤和岩石进行原位测量分析,并寻找月球南极“水冰”。9月4日,印度空间研究组织宣布“月船”3着陆器进入休眠状态。在此之前,有效载荷已部署完毕,着陆器的接收器保持开启状态。2023年9月22日,印度空间研究组织尝试唤醒“月船”3,试图与着陆器和月球车建立通信,但目前尚未收到信号。

图2 “月船”3探测器
二、系统组成
“月船”3的总质量为3.9t,为了保证任务成功,“月船”3在“月船”2的基础上,削减了科学载荷数量,用于装载更多燃料。同时,加大了着陆腿强度,并增加了激光测速计,提升了着陆能力。
“月船”3着陆器模块(见图3)的有效载荷包括:
(1)钱德拉表面热物理实验载荷(ChaSTE)。该仪器用于测量着陆器周围月壤的热导率和温度分布,其配置了10个独立温度传感器的温度探头,可下探到月面下10cm深度。
(2)月震仪(ILSA)。该仪器用于测量着陆点周围的地震活动,深入研究月球地质环境。
(3)绕月高敏感电离层和大气无线电分析-朗缪尔探针(RAMBHA-LP)。该仪器用于探测近月表区域等离子体(电子和离子)密度及其变化。
(4)无源激光反射器阵列(LRA)。该仪器可用于月球激光测距研究。
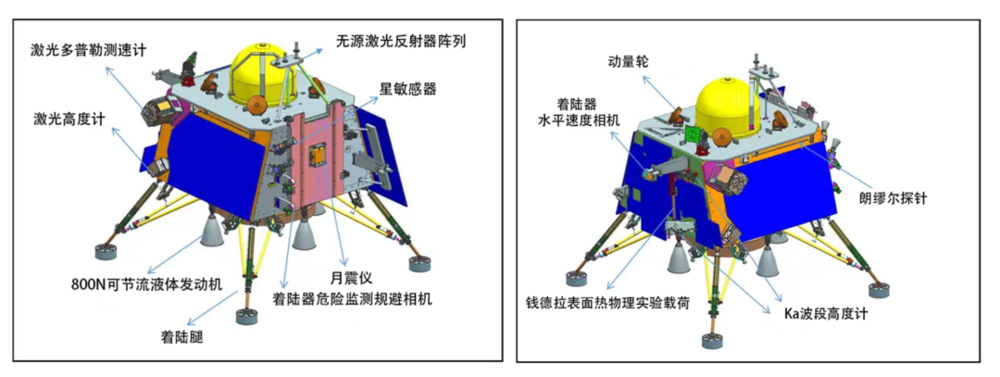
图3 “月船”3着陆器各部件示意图
“月船”3月球车(见图4、图5)的有效载荷包括:(1)阿尔法粒子X射线光谱仪(APXS)。该光谱仪用于开展原位探测,分析月壤化学成分和矿物学特征。(2)激光诱导击穿光谱仪(LIBS)。该光谱仪用于非接触式原位探测,对着陆区附近的月壤和月岩元素组成(Mg、Al、Si、K、Ca、Ti、Fe)进行快速分析研究。
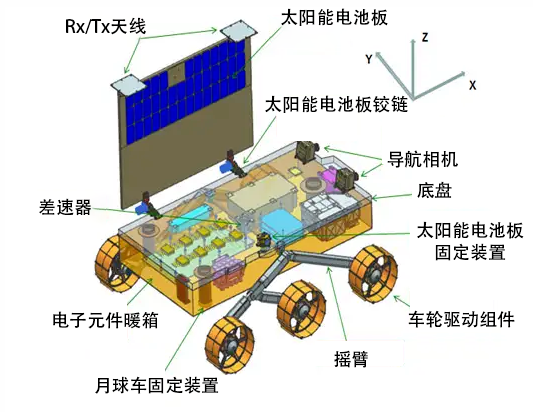
图4 “月船”3月球车各部件示意图
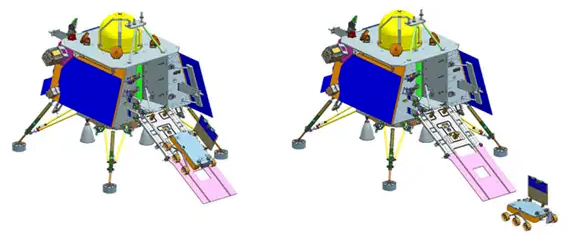
图5 月球车从着陆器上释放过程示意图
“月船”3推进模块(见图6)的有效载荷是宜居行星光谱偏振仪(SHAPE),该仪器从环月轨道研究地球近红外波段分光偏振测量特性(波长1~1.7μm),以促进地外宜居行星研究和地外生命搜寻。“月球”3的技术参数见表1。

图6 “月船”3推进模块各部件示意图
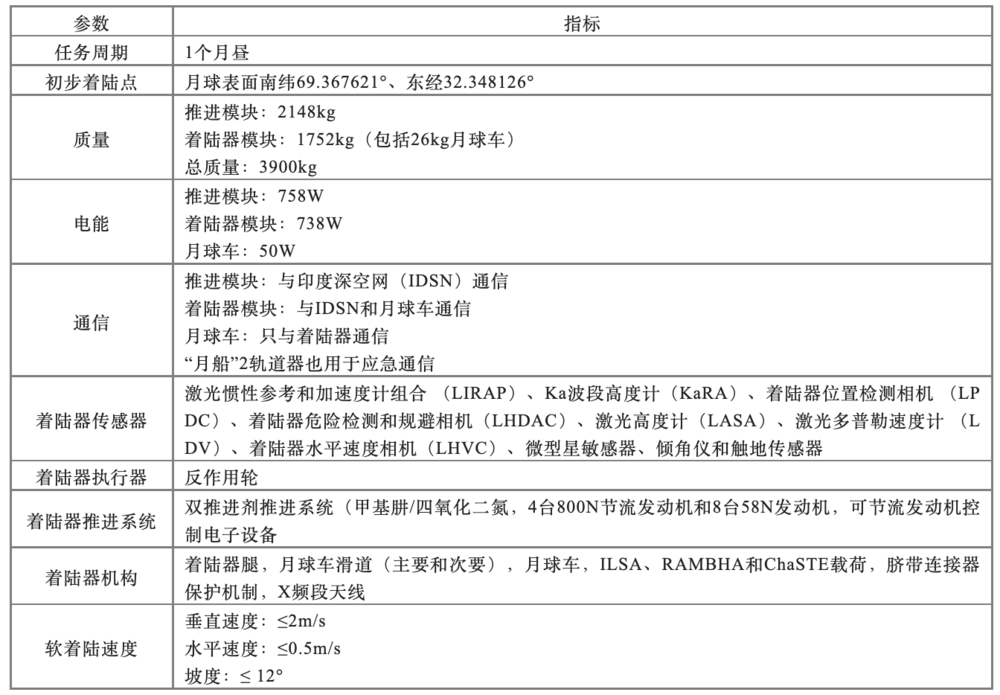
表1 “月船”3技术参数表
三、飞行过程
按照预定计划,“月船”3飞行过程分为3个阶段:地心轨道段、地月转移段和月心轨道段,飞行过程如图7所示。在地心轨道段,“月船”3通过5次升轨机动,轨道高度逐步抬升,然后进入地月转移轨道;到达月球附近后,再通过近月制动逐渐降低轨道高度,抵达100km高的环月轨道;最后,再择机实施月面软着陆。“月船”3变轨情况见表2。2023年8月23日,“月船”3“维克拉姆”着陆器在近南极区域成功着陆(见图8)。
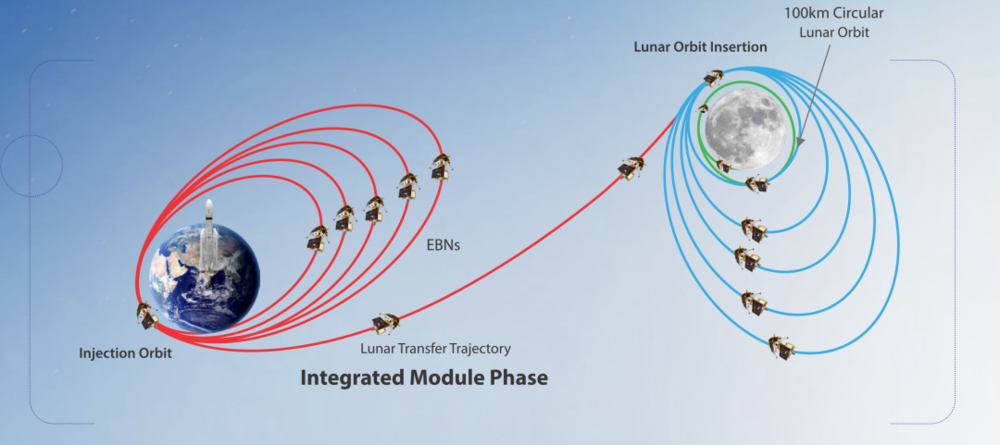
图7 “月船”3任务飞行过程示意图
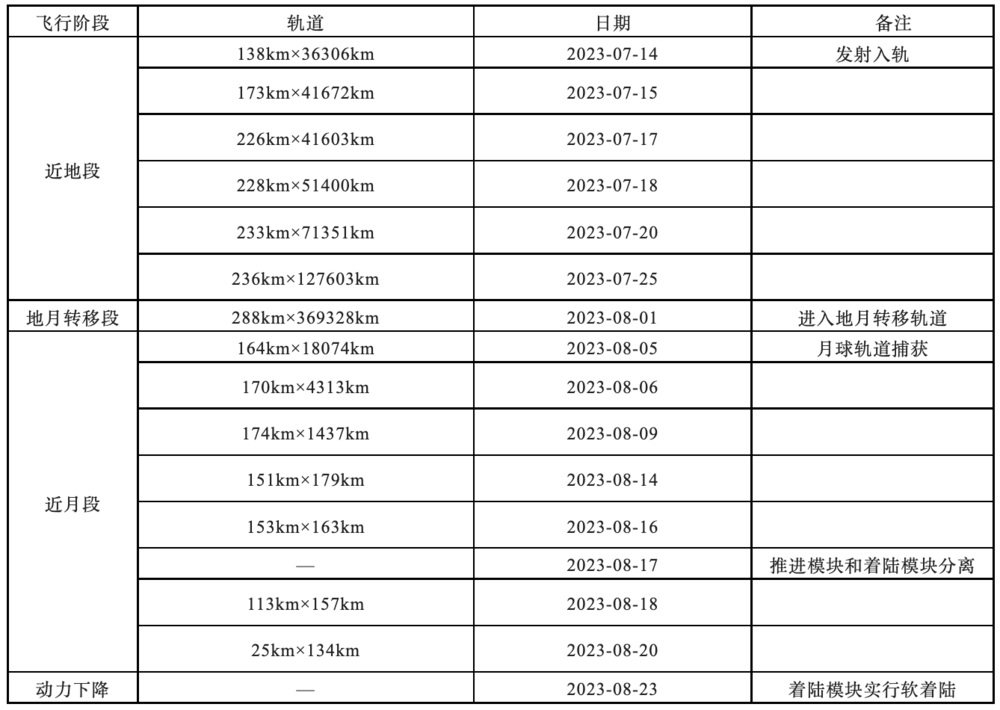
表2 “月船”3变轨情况
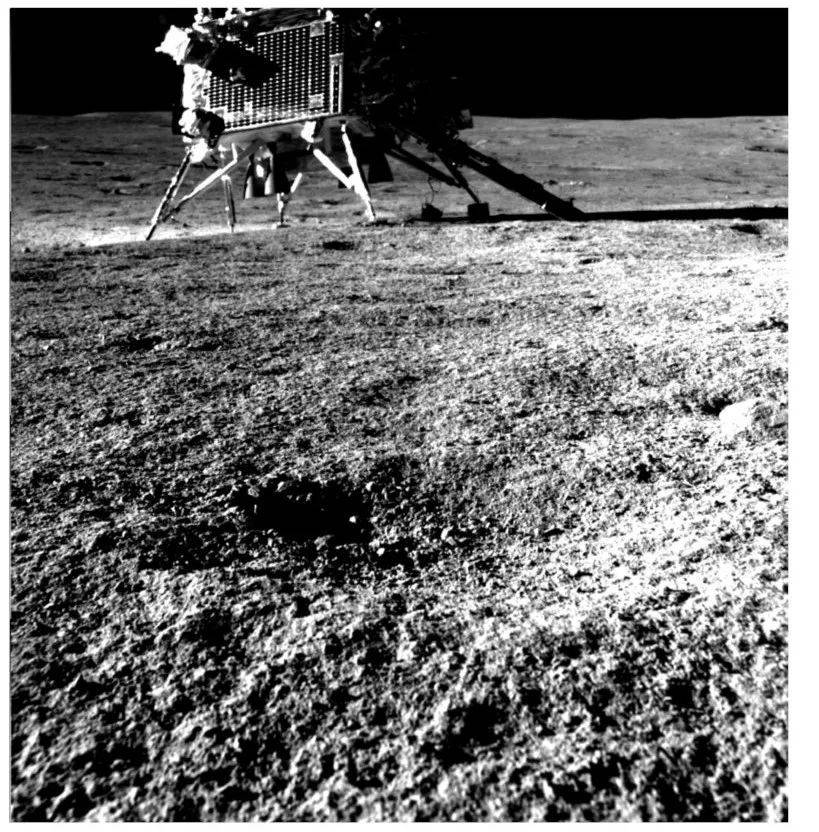
图8 “智慧”月球车拍摄的“维克拉姆”着陆器照片
四、任务分析
“月船”3的着陆区域位于月球近南极地区,对寻找月球水冰资源具有重要意义。月球赤道面相对黄道面的倾角为1.54°,因此月球极区的一些撞击坑内部始终无法被太阳光照射,处于永久阴影区。
2013年,美国“月球勘测轨道器”发现月球极地永久阴影区的雷达回波异常。通过分析撞击形成的溅射物光谱特征,综合雷达观测、中子探测仪、红外光谱探测、月球矿物绘图仪等数据,科学家一致认为月球极区的月壤中存在大量水冰,并通过“月船”1搭载的光谱矿物绘图仪测量月球永久阴影区的反射光谱,判断出固态水冰的近红外谱段吸收峰特征。印度空间研究组织最新发布的信息显示,“月船”3搭载的激光诱导击穿光谱仪首次对月球南极附近表面的元素成分进行了测量,明确证实有硫元素存在。
“月船”3任务的成功是建立在“月船”1和“月船”2任务基础上的。“月船”3借鉴了“月船”2任务失败的教训,在任务设计中进行调整和改进,最终成功实现月面软着陆。“月船”2采取的是基于成功设想的设计,可靠性和冗余度不够,因此“月船”3改为基于故障设想的设计,考虑了引擎故障、传感器故障、计算故障、算法故障等各个方面,增加了相关设备的冗余(如增加了1台着陆器星载计算机),提升了任务的可靠性。同时,减少了科学载荷数量,增加了燃料的携带量。“月船”2轨道器搭载了9台科学载荷,而“月船”3推进模块仅搭载了1台科学载荷——宜居行星光谱偏振仪。
同时,“月船”3也存在一些不足。一是关键技术能力欠缺。例如,由于火箭发射能力和深空测控能力不足,使“月船”3入轨精度不够,原计划进入近地点170km、远地点36500km的大椭圆轨道,实际进入近地点138km、远地点36306km的轨道,从而导致星上燃料额外消耗,增加了任务风险。
二是月面存活能力不够。月球车设计寿命仅为1个月昼,约14天。这大大限制了“月船”3的探测能力,不利于科学目标的实现;但从工程角度讲,降低了任务的复杂度和实施难度,有利于保证任务的成功。
三是深空测控能力不足。印度IDSN由印度空间研究组织负责运营,在原有ISRO 遥测跟踪和指令网络(ISTRAC)的基础上,增加了18m和32m天线,构成了基本的深空测控网,初步具备深空测控能力,但在实际深空任务中,仍需要依赖美欧深空测控网的支持。
五、启示
基于以上对“月船”3任务的分析,笔者得到以下启示:
(1)循序渐进开展深空探测。客观地讲,“月船”3的成功并不是偶然的,前期的“月船”1和“月船”2已进行了重要的技术积累。循序渐进地开展深空探测任务是符合工程和科学规律的。我国的探月工程也正是遵循着循序渐进的技术路线,根据“绕、落、回”三步走战略,保障了任务的成功实施,并为“天问”一号任务探测火星,实现 “绕、落、巡”提供了重要技术支撑。在后续探月工程四期、火星探测、小行星探测等深空探测任务中,要继续遵循循序渐进的方法,脚踏实地、步步为营,逐步拓展深空探测任务边界,稳步实现科学和工程目标。
(2)保持深空探测的持续性。深空探测任务具有一个重要特点,即持续性要求强。深空探测技术百炼成钢、用进废退。尽管印度探月任务前期出现失利,但始终保持持续的探测,后续还规划了“月船”4任务,继续开展月球极区探测。我国已经启动探月工程四期,持续开展月球资源开发利用技术验证,并以此为抓手,不断夯实工业基础,在任务中磨砺人才队伍、迭代和改进关键技术。
(3)开放合作实现互利共赢。深空探测事业是拓展人类认知、服务人类文明、增进人类福祉的伟大事业,同时具有风险性大、科学价值高和时间跨度长等特点。我国应继续扩大在深空探测领域的开放合作,加快推进国际月球科研站建设,为和平利用外层空间、在外空领域推动构建人类命运共同体作出更大贡献。
本文来自微信公众号:中国航天(ID:zght-caecc),作者:高朝阳、邵艳利、康晓晰、张天馨、郭翔(探月与航天工程中心)
