2017-12-06 21:44

虎嗅注:听过很多人说无人驾驶,看到很多无人驾驶成果的新闻。但什么是真正的无人驾驶,我们究竟还能不能等来坐无人驾驶车辆的那一天?
驭势科技CEO吴甘沙今年再一次出席了F&M创新节,分享了他们在无人驾驶方向的研究历程和最新成果。吴甘沙回答了人们关于什么时候能坐上无人驾驶汽车的问题,还娓娓道来分析了无人驾驶商业化的障碍及应对方案。这场演讲满满都是诚意和干货,关于无人驾驶,你想了解的应该都在这篇文章里了。
本文由虎嗅根据吴甘沙演讲整理。
大家好,很高兴又一次来到F&M创新节。每年这个时候正好是非常好的总结、沉淀的时候,那这一年我们在无人驾驶的商业化方面,有了很多的探索,也积累了不少的经验,今天也非常高兴借这个场合跟大家做一个分享。
题目叫“无人驾驶的方向盘”这句话本身是矛盾的,无人驾驶就应该没有方向盘。事实上我们做无人驾驶的过程,就是不断的去接近把方向盘拿掉的过程,而这里面需要一个商业化的阶梯计划,具体是什么阶梯计划一会儿跟大家分享。
首先跟大家分享一个观察。整个汽车产业现在面临的是一个价值估值体系进行重构的过程,从自动驾驶到无人驾驶,几个月前最大的一个新闻是特斯拉。这一家新兴的造车公司估值超过了已经存在了上百年的通用汽车和福特。这事实上是违背商业价值规则的一个变化,为什么?特斯拉一年造十万台车,还是有巨大亏损的一家公司,而通用汽车一年造一千万台车,纯利一百亿美金,为什么有这样的一个巨大变化?因为特斯拉它有一个自动驾驶的故事。
当然最近几天,如果大家再看股市的话,发现通用汽车的估值市值又重新超过了特斯拉,为什么?因为它也有了很好的自动驾驶的故事,但是这个还不够。大家看优步不拥有一辆汽车,它的估值达到六百至七百亿美金,因为他有一个共享出行的愿景。
而谷歌的一个Spin-off,就是WayMo,刚刚出现的一家新的创业公司,摩根斯坦利给他的估值达到了七百亿美金,为什么?因为他带来了估值方式革命性的变化。传统一台汽车,车厂赚1400美金,如果说摊到他的生命周期14万英里的整个里程去,一英里赚1美分,而谷歌的WayMo如果用无人驾驶汽车来去实现出行的服务,一英里能够赚1.25元,中间的差距100多,这是估值体系重构的过程。

什么时候能实现真正的无人驾驶?
这样无人驾驶的出行什么时候能够实现?现在有两种说法。
一个说在2121年。为什么是在这个时间点?绝大部分的车厂和科技公司在2016年的时候做了五年计划,2016年加上5年等于2021年,没有任何的道理可言。但是我们现在处在一个默顿定律的世界,默顿定律不像牛顿定律有非常清晰的因果关系,比如我用多大的利益产生了多少的利益,而是大家相信会在2021年发生,于是大量的资本、人才进去了,而这种预言不知不觉当中自我实现了。
2021年是一个非常重要的时间点,当然也有很多人认为就无人驾驶高度复杂的系统来说,可能到2021年并不一定能够达到目标。
他们运用了另外一个定律叫做“Amara法则”,人们往往会高估技术的短期影响力,而低估技术的长期影响力。如果有人跟你说这个技术两年就能改变这个世界,往往他太乐观了。另外一个人说这个技术我一辈子都不可能看见他发生,而五年、十年就发生了。2025年是另外一个重要的时间点,无论是2021还是2025,它离我们并不遥远。
这五到十年是我们不断地要把方向盘拿掉的过程,同时也是不断地安全地去实现无人驾驶的过程。今天我们可以看到几条清晰的路径。
 特定区域里实现的无人驾驶
特定区域里实现的无人驾驶
一个还是有方向盘,在特定的区域里面能够实现无人驾驶。这是特斯拉的演示视频(见上图),在特定的区域里面才实现了无人驾驶,在多数时间里面是人在开,但是当他到达了目的地下车以后,这个车在无人驾驶的状态下,在停车场可以自己去寻找一个停车位,这就是我们所谓的有方向盘,在特定区域里边的无人驾驶。
再下一步是有方向盘,在更大区域,在城市的一大片区域里边而不仅仅在停车场具备了无人驾驶的功能。这就是谷歌号称无限接近无人驾驶商业化的一套系统,它基于的车型是菲亚特克莱斯勒的电动汽车,它已经在美国的20个城市实现了无人驾驶试运行。当然今天的试运行前排还是要坐人的,但是他认为他已经无限接近的把前排驾驶员拿掉。
又比如说通用汽车在2016年3月份花了十亿美金买了一家创业公司,叫 Cruise Automation,大家都觉得他买贵了,但是事实上在这一两年通用汽车凭借着这支团队在无人驾驶,尤其是在旧金山的复杂场景里面实现无人驾驶,他获得了很大的突破,这也是为什么最近他的市值又超过了特斯拉。
真正实现在城市区域开放道路的无人驾驶,我们认为还需要一定的时间。

无论是技术成熟度本身还是在支撑无人驾驶的基础设施上,都还需要五到十年的时间。我们就拿谷歌的Spin-off WayMo来看(见上图),X轴是时间,Y轴它是每开了多少英里需要一次人的干预。大家看2015年平均下来大概是1300英里需要一次人的干预,有的时候特别好,比如说他在圣诞节的时候和感恩节的时候,路上没人,所以它的能力非常强,有的时候又降下来,整个2016年他已经能够实现每1500英里需要一次人的干预,非常棒的数据。
像我一个人一年就能够开8000多公里的路程,也就是一年需要一次人的干预,如果不干预轻则一个小小的事故,重则车毁人亡。
谷歌的能力比起特斯拉和优步是非常强的,但比起美国人类驾驶员差的很多,美国人类驾驶员平均每开15000万英里才出一次小事故,每开9千万英里才出一次致命的事故,所以我们期待未来的五年、十年里面我们能够把这个差距缩短甚至超过人类驾驶员。
第二个法律法规的成熟,我们认为还需要三到五年。也就是说我们政府的法律允许无人车能够上路接客还需要三到五年。另外就是器件的成本能够达到大规模的可商业化还需要三到五年,比如说今天绝大部分的无人车都运用了一个设备叫做激光雷达,而这个设备一套是70万人民币,它离这样一种技术“飞入寻常百姓家”还需要时间。但是在未来的三五年我们能够看到清晰的路径:从70万降到1000或者2000人民币。
未来我们期待的是要把这个方向盘拿掉,但不想等五到十年才把它拿掉,所以我们必须分析商业化的障碍到底在哪里。
无人驾驶商业化的障碍在哪里?
第一个是在算法上面。今天的人工智能我们把它叫做弱人工智能,它存在一个特别清晰的边界,这种场景我见过,我会处理,我有标志的数据我能够认识,但是如果没有这种场景我就没办法,因为我们现在的场景,我们真正未来要运行的现实环境是开放动态的环境,不确定的环境。
另外一个是系统上的问题。智能驾驶的系统非常复杂,我经常引用的一个数据,一台奔驰S级轿车里面的代码行数,是一家波音787梦想客机代码行数的16倍,这么复杂的一套系统是没有办法保证它是没有BUG的,算法有边界,系统有BUG,决定了它今天不可能大规模商业化。
但如果一定要大规模商业化还是有办法的。
如果说它的算法有边界,我就把它放在一个边界里面去运行,我们把它叫做场景化的无人驾驶,在某种特定的场景下它能够工作的特别好。如果系统没办法保证没有BUG,那我一定要确保它出现事故的后果是可控的,会撞人但是撞不死人,怎么保证撞不死人?把速度降下来。在汽车领域有这样的统计数据,如果你是20英里的时速撞上了一个人,生还概率是95%,30英里时速撞上去,这个概率降到了60%,40英里降到了20%。所以我们一步一步来,先从中低速开始。
阶梯计划
所以我们有了一个阶梯计划,阶梯计划这个名字来自于大家都很熟悉的科幻小说《三体》,我要把人脑送到很遥远的星球上去,我的能源不足以一次性送过去,那我通过一个阶梯计划,每到一个计划,到这个地方,引爆一颗核弹,推动着辐射帆再到下一个阶段,这就是我们的一个阶梯计划。
第一部分我们实现五个场景。5到20公里的时速,在可控的环境里面非常低速情况下实现商业化。
第二个阶梯我们扩散到一百个场景。在开放的道路上,只不过速度是在20-60公里的时速,比如说我们在微循环,在最后三公里的出行上能够去实现。
而第三步才是通用城市场景开放道路。而且我们认为60-90公里的时速就能够做的足够好,解决我们城市里边绝大多数人出行的问题,大家知道北京的道路除了几条高速之外限速是在90公里以下。
这是阶梯计划,我们现在正在着力做阶梯计划的第一步。我们在广州白云机场实现了中国第一次面向公众的试运营。一台车,两排座椅对着坐,没有方向盘、油门、刹车,它往返于一号航站楼和4号停车场之间,把那些经过长途旅行非常疲惫的乘客送到他停车的地方。
又比如说我们跟凯德集团在杭州来福士的合作,想象一下你在商场里面大包小包买了很多的东西,再下到停车层,停车场非常大,几千个停车位,可能你离你的停车位非常远,很多人都找不到停车位。前一段出了一个新闻,上海一位女士花了两个月才找到了她停的车。
而我们提供了一个非常舒心的服务,用手机可以叫一辆车,输入你的汽车车牌尾号以后,它能够知道你的停车位在哪里,并把你送到你的停车位那里。在地下的停车场,没有GPS,靠人工智能实现老马识途。

你们看(见上图),我们在杭州来福士接的第一单,是一家四口人,其中那个孩子可能是中国第一个尝试了无人驾驶车服务的孩子,我们当时就觉得这是一个特别有温度的无人驾驶。
我们整个三季度,我们这个车一直在那边运营,我们要求我们的工程师每一个人都要去现场体验一下,看一看我们的用户怎么在用我们的技术,他用过以后是什么样的反馈。特别是当时有很多的孩子正值暑假,他们都非常高兴第一次接触到了无人驾驶的服务,而且这个并不是演习或者是演戏,在中国第一次实现了长达数个月的商业化试运营。
还有一个就是分时租赁,加上智能小区或者是停车场,大家想一想分时租赁的话,租一个辆汽车开了30分钟,还了20分钟。而有了这样的技术,可以把这个车开到还车的点,就可以走人了,它自己在停车场里边找到一个停车位,而且它发现自己快没电的时候还会找到带一个无线停车位自己去实现充电停车。
这都是我们的探索,离规模化的商业化还有距离,主要体现在三个方面。
第一个如何实现真正的安全可靠和一致。安全很重要,可靠在各种不同的工况、天气的情况下是不是能够做到非常的稳定可靠。而一致,我做一辆车,做20辆车,做100辆车1000辆车都是完全一致的,非常重要。第二步,我是要真正实现无人,不但没有驾驶员,也没有在车上值守的安全员。第三个在成本和颜值之间得到一个很好的权衡。
首先是安全、可靠,我们怎么实现安全?我们没办法在现场能够实现长达几千个小时,几万个小时的测试,但是我可以在一个虚拟环境里面进行率先进行测试。我可以通过一种三维重建的方法,在我的虚拟环境里面把这个场景记录下来,我们可以进行各种的测试,在场景里面放入很多随机的人或者是车。如果说我们在虚拟环境里边已经完成了测试以后,我可以把这辆车放在台架上,让他去虚拟的进入到他马上要部署的环境里面,车的方向盘、轮子都在动,但其实是在台架上面,在它的大脑里面在经历这么一个真实的场景。
这样的一套系统需要一个非常稳定、可靠的硬件。比如说在车上,这个汽车大脑里边,有专门处理AI算法的控制器,有专门处理定位的控制器,有专门需要对底盘的制动、加速进行控制的,甚至需要一个远程控制器,使得远程能够控制这么一个车,还需要一个黑匣子,把车经历的情况都记录下来。所有这些都在这么一个非常安全可靠的车载电脑里边。

另外一方面需要实现无人。因为它是无人驾驶,如果在车上还放着一个人监控系统,无论从体验上面还是客户的信心上面都是不够的。怎么实现无人?现在我们实现了一套对车进行远程监控和控制的系统,(见上图)你看在这个电脑上显示的是这个车的五个摄像头能看到的东西,它通过一个游戏的操作手柄可以实现对这辆车远程的监控和操纵,这个车里面并没有坐任何的人,但可以对它进行遥控。
而最后是成本和颜值的问题。我们的成本目标是让这么一个车每年的总体拥有成本,降到司机一年的人力成本以下,这是一个非常巨大的挑战。
因此我们在做各种各样的探索,比如说像刚才在广州白云机场的这个车,我们现在对它进行产业化,产业化的一个很重要的目标就是降低成本。原来那个车是双曲面的玻璃,可大规模量产的要求非常高,成本非常高,我们把它变成单曲面,在这个车上面进行了几十项设计的改动,使它可以大规模的商业化。
我们针对不同的场景可以度身定做传感器配置,使它的成本最小化。比如两个一线激光雷达,中间是8线,上面是16线,也有包括激光雷达和双目摄像头等等各种在内的传感器配置,针对这样的场景做到足够好,做到最便宜就够了。
另外我们也找到成本相对不敏感的领域,比如说大城市的公交。现在大城市的巴士集团70%的运营成本在人力上,而且他要找A照的司机,有A照同时愿意去开公交的司机的人越来越少,怎么办?通过无人驾驶来实现。现在大家能够看到的一个就是无人驾驶的夜间小巴,在晚上路上几乎没人又没有公交的的时候,可以通过夜间小巴来实现出行。第二个就是BRT快速公交,它本身已经有了一个专用车道,在这个专用车道它可以实现无人驾驶。
还有成本相对不敏感的领域,在城市里面的巡逻车,环保清洁车,物流车甚至于在仓库里面的插车都可以去实现无人驾驶。大家知道今年1月份CES(消费电子展)的时候,我们运了一辆车到拉斯维加斯参加CES大展,我们这个车挪了四次。从仓库到展会,大概一千多美金,从展区到展台又挪了一下,是一千多美金,回来又是两三千美金,其实这个完全可以通过无人驾驶来实现。
另外一个成本如果达不到目标,可以通过颜值来弥补。这里面我们有一个理念,我们要为无人驾驶从零开始去设计车型,而不是为了今天的车修修补补来去设计无人驾驶,这是一个理念上极大的改变,而这样的改变反映在这么一个车里面,这个车是我们针对中国城镇化的过程、针对新区新城特色小镇去设计的,我们希望这辆车出生一开始就具备非常强烈中国的基因,于是我们选择熊猫作为一个原始的意向。

这是我们车的模型(见上图),这是我们的真车侧面和正面的形态。这个车是完全没有驾驶员的,这时候如何设计车跟乘客,车跟行人的交互变成我们的一个创新点。
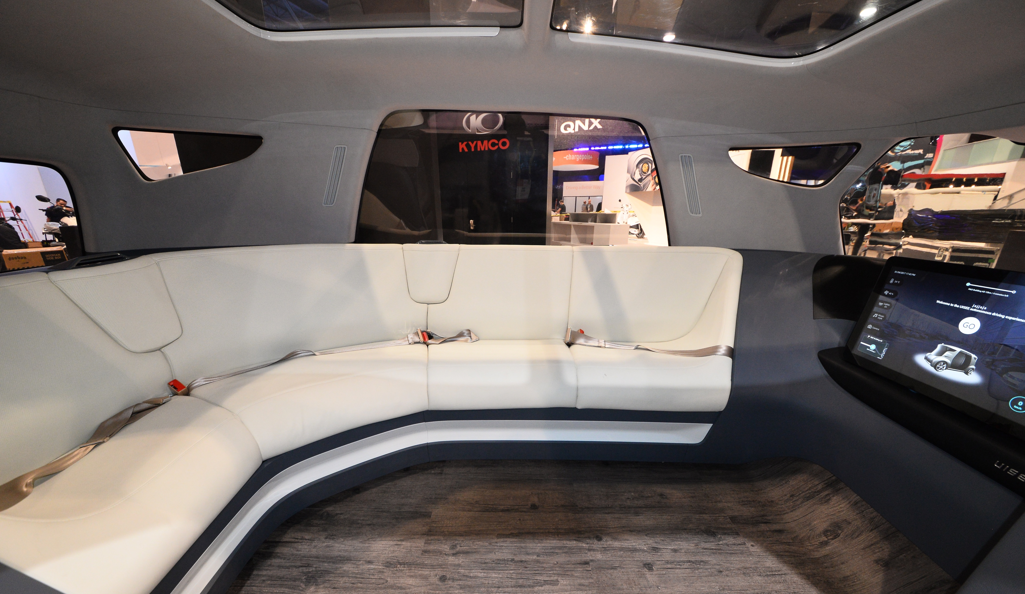
大家看(见上图)在车里面是有一个触摸屏跟乘客进行交互。而车身前面还有一个LED显示屏,能够跟行人进行交互。在车行动的时候,这个LED显示屏不断的显示一些非常清晰的视觉符号。比如说这是右转,右边的轮廓灯可以提前闪动,提醒乘客能够坐稳。碰到一个行人的时候,在这个显示屏显示一个绿色行走的小行人,表示车已经看见你了,请你先通过。这个车我们也非常荣幸的拿到了红点设计的概念大奖。
在红点设计的历史上,一共有两台无人车获得过奖。一台是谷歌WayMo,它获得的无人驾驶小车。另外一个是F015,这是来自于奔驰的一款无人驾驶概念车。我们这个车是第三台车,但是可能是唯一一台会量产的车。
最后是一个总结
我们也是一个造车的新势力,但是我们跟其他造车的伙伴并不一样,首先我们是创造车,而不是制造车。创造车是一个智力活动非常密集的活动,而制造车是一个资本非常密集的动作。那另外一方面,我们是开放式的造车而不是封闭式造车,我们刚才显示了两种无人车设计,而这两种无人车设计我们都会逐步的开放出来,让我们行业里边的造车伙伴能够直接用它,或者是在这个基础上造出各式各样的更加廉价的,但同时又是有人性化的无人驾驶的车,这是我们的一个目标。
这是我今天要跟大家分享的,我相信无人驾驶是一条很长的路,在这条路上,我们非常愿意跟在座的先行者同行,跟开创者共创,谢谢大家。
本内容由作者授权发布,观点仅代表作者本人,不代表虎嗅立场。
如对本稿件有异议或投诉,请联系 tougao@huxiu.com。
如对本稿件有异议或投诉,请联系 tougao@huxiu.com。
频道: 车与出行