




2019-04-04 12:34

扫码打开虎嗅APP

本文来自微信公众号:我是科学家iScientist(ID:IamaScientist),作者:张熇
在人类探索月球的历程中,关于月球背面的阴谋论和谣言甚嚣尘上,阿波罗登月是假的?世界各国都不探月了?月球背面有外星人?月球内部是空心的?当然,这些都是不存在的。那么,这里为何值得嫦娥四号“走一趟”?中国空间技术研究院嫦娥四号探测器项目执行总监、副总设计师张熇为大家带来演讲《嫦娥四号:去月亮背面,去未曾去过的地方》。
以下为张熇演讲实录:
我是张熇,来自中国空间技术研究院。很荣幸,因为这张照片,我在网络上火了一把。

其实,我从2001年就开始从事我们国家探月工程探测器的设计研制工作,参与了我们整个探月工程“绕落回”发展战略(即绕月探测、月球软着陆和自动巡视勘测、月球样品自动取样返回探测)的论证,参与了嫦娥一号、嫦娥三号、嫦娥四号几个探测器的研制。
要说到我跟航天的结缘,可以追溯到1986年。上初三的时候,我订了一本杂志,这个杂志叫《航天》。从那个时候,我就从内心非常喜欢航天这样一个“有点未知、有点冒险”的事业。后来也一直从事相关的工作。
今天我主要和大家分享一下嫦娥四号的故事。大家知道,嫦娥四号是人类首次着陆到了月球背面。其实,最初决策着陆地点的过程,挺漫长,也挺艰苦。
2013年,嫦娥三号任务圆满完成后,我们就开始论证:嫦娥四号的目标到底是哪儿?
当时,我们也提出过:继续落在月球正面另一个地方,或者落在月球背面,甚至于可以落到月球的极区。
从科学探测的角度来说,落到任何一个地方都可能有新的发现,都很有意义。但是,月球背面——没有国家的探测器在那儿着陆过,那么我们有可能有更多新的、首创的科学发现,意义更大。
作为航天工程师,我们的任务就是权衡我们的设计是不是能够满足这样的一个任务需求。

演讲嘉宾张熇:《嫦娥四号:去月亮背面,去未曾去过的地方》
当时有很多专家说,既然月球背面没有国家去过,应该有两种可能:一种是,去背面没有什么意义,所以大家都不去;要不然,就可能是技术难度太大了,大家都去不了。
我们经过充分的分析论证,经过一段时间终于提出来合适的方案:增加一颗新的中继星,然后对原来嫦娥三号研制的着陆器、巡视器进行适应性的改进、优化。我们认为可以实现着陆到月球背面这样一个目标。
但当时,还是有很多质疑。每次科学家们提出不同的疑问,我们就要做相应的分析仿真,然后解答其中的问题。
2015年,在一次决定“嫦娥四号最终去哪儿命运”的评审会上,专家们还是有一些不同的意见。我们的叶培建院士,他凭着多年的工程经验和敏锐的战略思考,说月球背面没有人去过,这就是最大的意义,因为我们空间探索的目标就是要探索未知,那么“没有人去过”本身就已经是很大的意义。
最终,决定了嫦娥四号要着陆到月球背面。这从科学上和技术上都有很大意义。
从科学意义上说主要是有三个方面:
第一,因为月球背面挡住了来自地球的辐射,同时它自身没有电离层、没有大气层,是一个非常洁净的电磁环境,非常适合开展月基的天文观测——这也是世界各国开展射电天文观测的天文学家们梦寐以求的地方。
第二,月球背面的地质年龄比月球正面要古老几亿年,我们到这个地方探测,就有可能发现更多、更早期年代的一些物质。
第三,月球背面撞击坑非常密集,有我们太阳系最大的撞击盆地,叫“南极-艾特肯盆地”。探索这个盆地有可能发现一些月球深部的物质,为月球的起源演化研究提供很多数据。
从技术上,主要的挑战分两个方面:第一,怎么实现高精度地、安全地着陆,第二,怎么实现和地球的通讯。

其实月球本身是一个球体,它没有所谓的正面背面。月球是地球的一个卫星,围绕地球来运动;但是由于潮汐锁定的效应,月球自转的周期和它公转的周期基本上一致。这样月球始终一面朝向地球,一面背向地球。由于月球自转轴有天平动(指天文学中观察所见到的非常缓慢的周期性振荡)的运动,所以不是完整的50%看不到,而是只有大概40%看不到,60%可以看到。
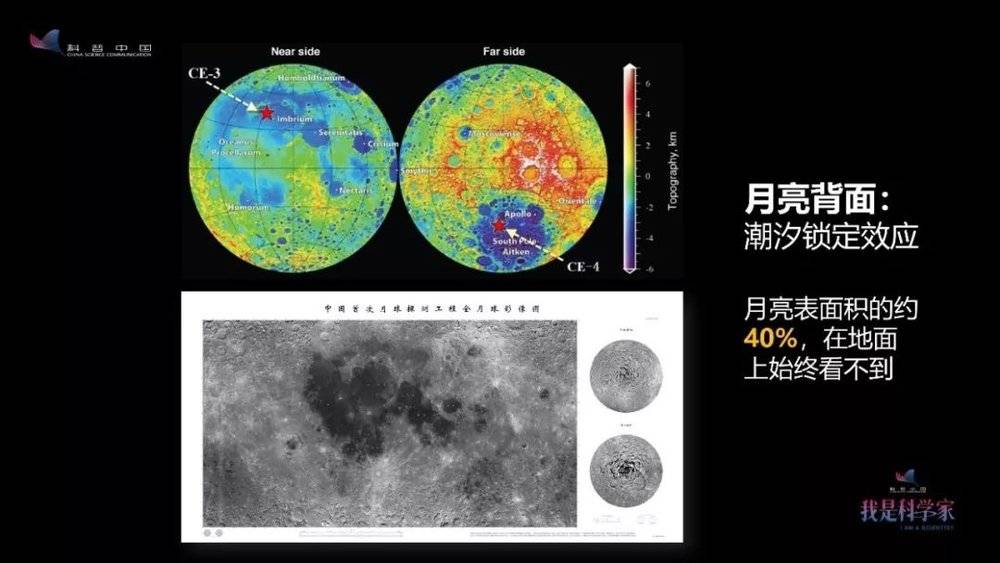
在这张图上,左上是月球的正面,就是冲向地球的这半边。我们嫦娥三号就是着陆在月球正面西北的虹湾地区。右上这张,红的、蓝的颜色很丰富的,就是月球的背面。从这两张图可以看出正面相对地形比较平坦;背面的高地很多,撞击坑非常得多,很难找到一块比较平坦的、大的地方。最下面这张图是嫦娥一号,当时我们国家第一颗月球探测卫星,获得的一个全月面的地图。
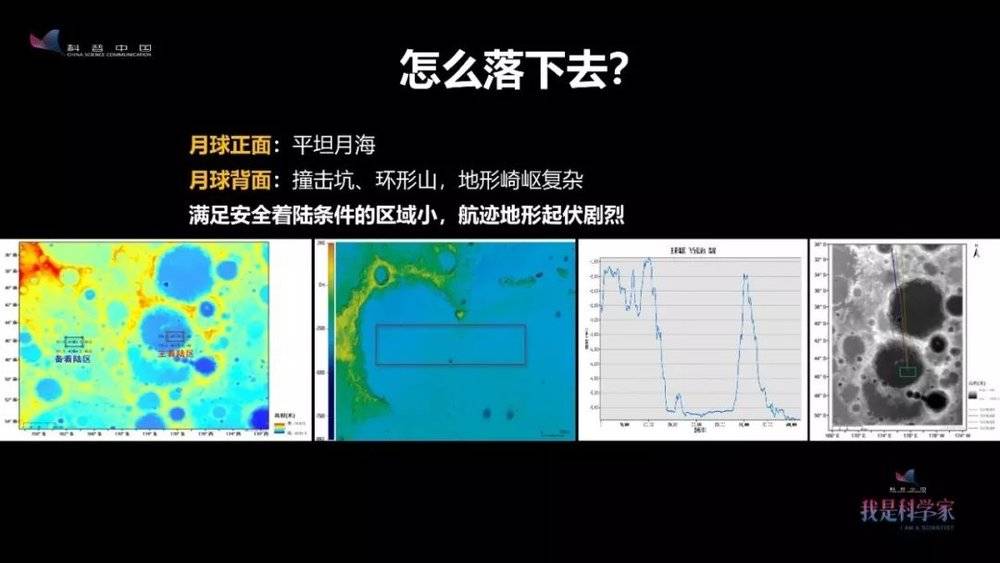
在月球正面和背面地形有一定差别的情况下,左一图是月球背面我们希望着陆的南极艾特-肯盆地内部的一片区域,红色、蓝色、黄色代表的是月面的高程(即某点沿铅垂线方向到绝对基面的距离),蓝色偏深的是地势比较低的,红的是地势比较高的。
从这张图上可以看到比较大的、平坦的地区是很少的,所以我们后来选的主着陆区,就是红色的冯·卡门撞击坑(位于艾肯特盆地中部,是整个太阳系最古老的撞击坑)里能够安全着陆的一个平地,大概只有50×30公里这样一个范围。
再往右,左二是嫦娥三号当时的着陆范围。可以看到,大片蓝色的都是很平坦的地区,我们就可以在一个很大范围内着陆,对控制的精度等等要求相对低;到了背面,只能在很小的区域着陆,对整个飞行过程的控制、着陆的控制,就提出了更高的要求。
背面地形起伏还带来一个问题,就是航迹地形起伏剧烈。在着陆的过程中(右一图),先经过高地,中间经过一个凹坑,然后又经过这两个坑之间的高地,最后再进到坑里边。这个航迹的起伏,中间这条曲线最多可以达到四五公里。这个过程中,我们要对月面进行测距测速,地形起伏带来很大的影响,会带来很大的导航误差,给我们带来了很多困难。所以,在嫦娥三号基础上必须要做改进和创新,才能实现在这样一个复杂崎岖地形的安全着陆。
我们主要是做了四个方面的工作:
第一,优化、精细化轨道的设计和控制。我们要在轨道每一次变轨之后进行精细的控制,最终能够让它进入到刚才图中画的比较小的框里边。
第二,做精细化的发动机推力的在轨标定。着陆的过程主要是靠着陆器上的发动机的推力来提供减速的能力,这个推力有1%的偏差,着陆点就会偏出几公里的量级。而在轨发动机在一个真空的复杂环境下工作,和在地面上做测试标定还不完全一样,所以我们要在轨标定,精确地标定推力到底是多少,来保证最终精确着陆。
第三,对整个动力下降、整个着陆过程的策略进行了优化。上图中,左边是嫦娥三号的着陆轨迹,右边是嫦娥四号的着陆轨迹。主要的变化在于主减速段结束的时候,嫦娥三号从15公里减到3公里左右,而嫦娥四号优化之后的效果就是到8公里以后,我们已经到了着陆区的冯·卡门撞击坑的上方,再进行对月面的测距测速,面对的目标已经是未来的着陆点,就不再受比较大的地形起伏的影响。
第四,接力避障。因为月球背面撞击坑非常多,如果没有地形识别没有避障的策略,很可能会着陆在斜坡上等等,就会有翻倒的危险。我们是设计了先是光学避障,后面还有激光三维成像避障、两轮的避障来实现选择安全着陆区,最终实现了一个“定点、定时、精确”的着陆。

这张图中,左上角的图片,就是嫦娥四号在着陆过程中,距月面100米高度时有一个悬停。所谓“悬停”,就是相对月面的速度基本上是0。在这几十秒的时间内,我们用一个激光三维成像敏感器生成了右上这张图,可以明显看出有两个大坑,右边也还有坑。
我们着陆器上的计算机会自主根据这张三维图像来识别坡度凸起和凹陷,来寻找满足要求的地点着陆。最终,我们选择了右上图中红十字的地方,在几个坑中间找了一个相对平坦的地方。
下面两张图片,都是光学相机成像,通过图像匹配最终定位着陆在三个坑中间的一个位置。右下角这张照片是我们人类获得的第一张月球背面近距离的一个图像。这些图像,在普通人眼里可能只是图像,但是在搞月球科学的科学家眼里,可以由此分析一些石块撞击坑的分布,等等,都会让我们对月球的起源和演化有更多的科学认识。
到了月球的背面,我们看不到地球了,而通讯都是要通过直接可见的微波通讯,所以就需要一颗中继星:着陆器、巡视器的信号先发给中继星,中继星再发给地球。
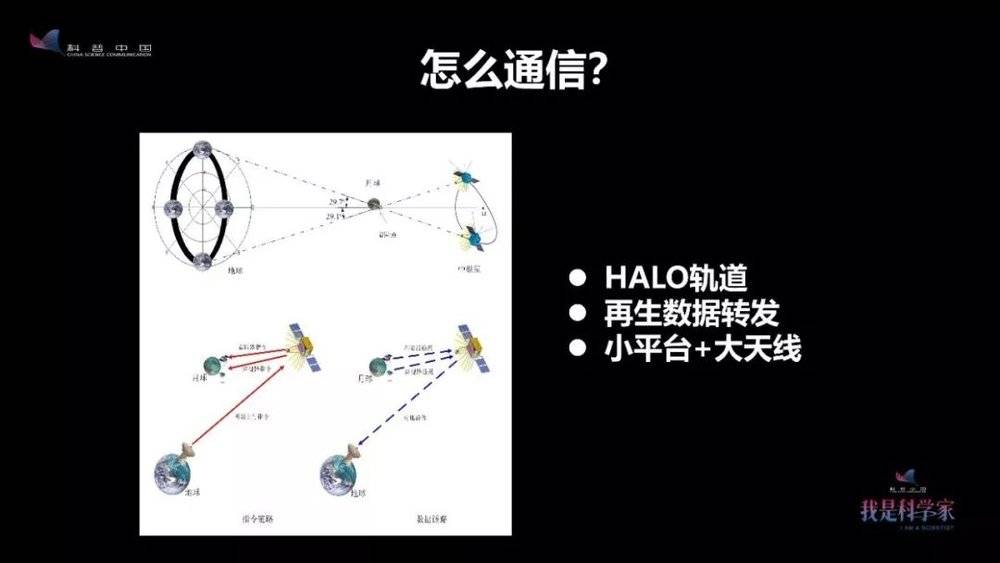
中继星工作在什么样的轨道?这需要精心的选择。它可以绕着月球运转,也可以选择一个更好的地点,也就是我们现在选的在地月L2点的HALO轨道。
月球和地球是一个地月系,在任何两个天体之间存在若干个引力平衡点。L2点是“拉格朗日2点”的缩写,这个点也是一个引力平衡点。航天器如果工作在这个地方,需要很小的一些控制的能量就可以让它保持在这附近运动。
L2点距离月球平均6.5万公里,选择在L2点工作有几个好处:一个是L2点工作的探测器始终可以看到月球的背面;第二就是我们可以设计这个L2点轨道的浮值(即浮动值)——卫星并不是站在L2点,而是围着L2点一个大的椭圆轨道转圈。现在我们设计的这个圈,大概浮值有1到3万公里,是比较大的一个圈——这样一个圈的好处就是它始终还能看到地球,地球并不会被月球遮挡。中继卫星工作在这个轨道,就能实现着陆器、巡视器把信号传给中继星,中继星再传给地球这样一个准实时的数据中继。
但这个轨道,也有一个唯一的缺点:离月球相对比较远,平均最远的时候可以达到8万公里,近的时候也有4万多公里。距离远,信号衰减比较厉害,那信道能传输的数据量就会比较受限制。
针对这种情况,我们采用了一种叫“再生数据转发”的方式,就是着陆器、巡视器发送的数据,发到中继星,中继星要进行解码,然后再编码传送到地球,这样我们就可以获得更多的信道增益来提高我们传输数据的数据量。

中继星采用了一个小平台加一个大天线的方式。右边这个大图,我们的中继星平台,就是下边这个银色的部分,一个一米见方的立方体,顶了一个直径4.2米的中继天线,我们把它叫做“伞状天线”。左边是它收拢状态,右边是展开状态。它由16根肋作为支撑,中间的这些网面是用金属丝编织的一个网面,口径大就有利于传输更多的数据。
这样一个天线在月球L2点轨道运行,要经历近300度的温差。低温到零下190度,高温到零上100度。如何在这么大的温差范围内保证天线型面的精度,也是很困难的一个问题。所以,我们这个天线在调试的时候也需要很费力的工作,工人师傅要精细地调整网面,调整以后,要把这个天线放到真空罐里面去做高低温的循环,让这些金属网的应力得到释放,做几遍以后得到一个型面精度非常好的天线。
目前,整个中继星在轨的工作的指向,整个天线的型面保证都非常好,实现了我们着陆器、巡视器的对地的终极通讯。
经过着陆的设计和通讯的设计,终于到了月球背面,接下来我们做些什么事情?
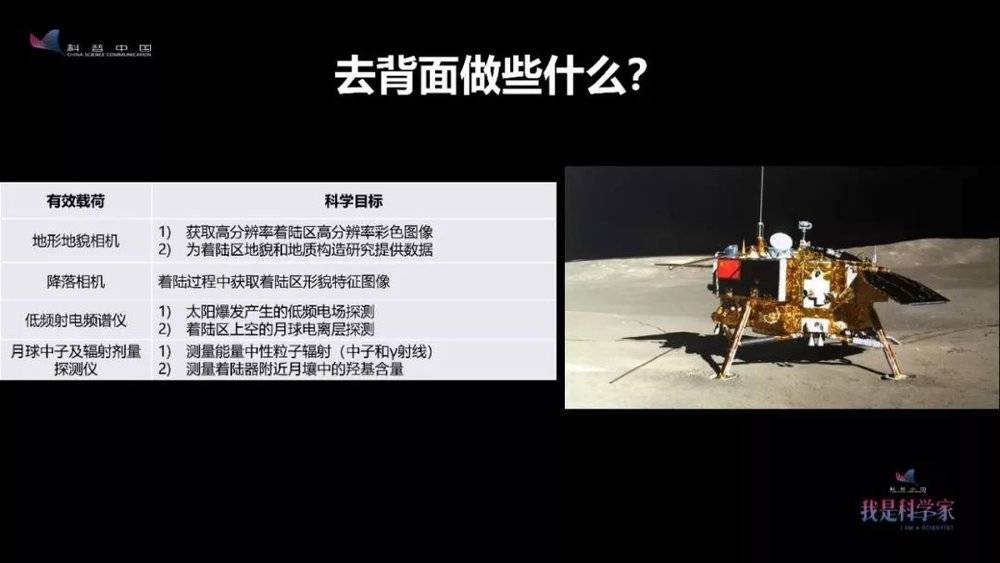
我们的科学家主要配置了这样一些载荷:一个是着陆器,着陆器上主要包括地形地貌相机、降落相机、低频射电频谱仪,就是刚才我说到的针对月球背面电磁环境,来做低频射电天文观测的。目前我们主要是做太阳爆发产生的低频的电场,还有着陆区上空的月球电离层的观测。
同时我们还带了一个月球中子及辐射剂量探测仪,来探月球附近的能量中性粒子的一个计量,还有可能探测着陆器附近月壤中的羟基的含量,因为羟基可能跟水的存在有关。现在这些载荷都已经开机工作了,但是数据的积累和分析还需要一定的时间。

这个是巡视器,大家可能都知道它叫“玉兔二号”,我们叫巡视器。它的上面装了包括全景相机、红外成像、光谱仪、测月雷达、中性原子探测仪。相机主要是拍月面的图像;红外光谱仪主要是测月球背面月壤的成分;测月雷达它是向月面发射电磁波,通过回波反射来反演月球的浅层的地壳结构;中性原子探测仪是测月球表面的中性原子的通量等等。
目前这些科学载荷都在正常工作,但科学数据的分析积累、科学成果的产生还是有一个过程。现在我们需要做的,就是让它们继续探测数据,给科学家一定的时间来分析积累这些数据。我们希望会有更多非常好的科学成果产生。
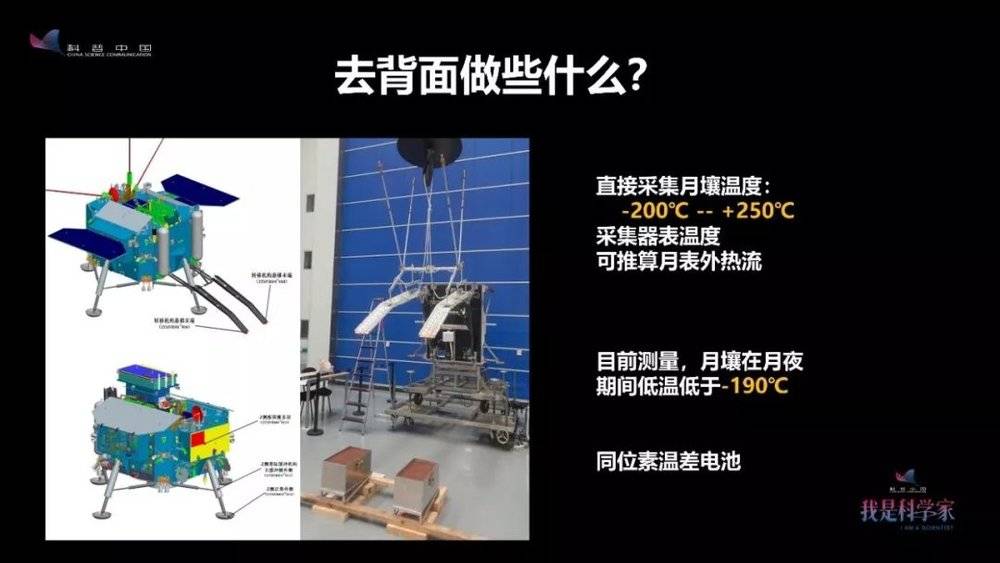
另外,我们嫦娥四号还做了一件比较有意思的事情:到月球背面测了一下月壤的白天和晚上的温度。因为在月球背面晚上是没有太阳光的,月壤没有大气层的保护,温度会降得很低。
以前我们都是靠国外的资料,这一次我们自己亲自实测了一下。我们把测温的敏感器放在巡视器梯子的端头上,这个端头最终在月面会接触到月壤,就可以有效测量月壤的温度。现在我们也测出来了,月球背面月壤在月夜期间的温度达到了零下190多度,我们和科学家也正在进一步分析,这可能跟月壤本身的特性,跟月壤的热特性有密切的关系。
为了实现这个月夜测量,我们还用了一个新的技术叫“同位素温差电池”。因为没有太阳光可以进行能量供应,所以用了同位素温差电池给这些测温装置供电——这也是国际上深空探测器普遍采用的技术:利用同位素元素衰变产生的热,再利用半导体材料热电转换效应把它转换成电。现在我们做的深空探测同位素温差电池提供的电能还比较少,但是等相关的技术突破之后,会给未来同位素电池的应用垫定一个比较好的基础。

这是嫦娥四号着陆器拍的着陆区周围的全景拼接的全景图,这是其中的一部分。可以看到中间竖着杆子,还有右边,左前边伸的杆子,就是我们月机低频射电频谱仪三根各五米长的测量低频射电谱的天线。
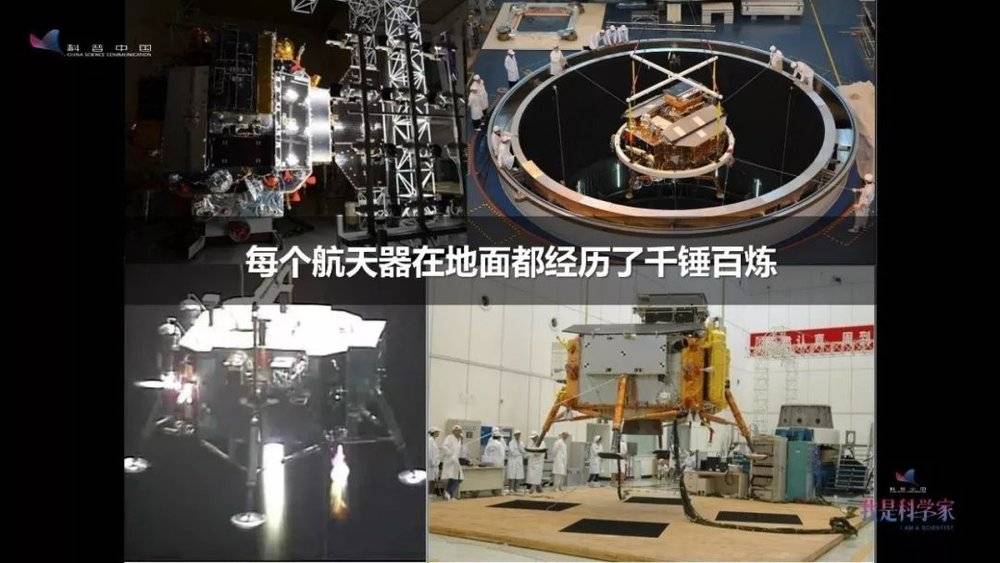
为了确保在飞行过程中的成功,每一个航天器在地面其实都经过了千锤百炼。在地面充分验证,这是我们航天任务成功的一个最基本的要求。
这是包括我们做光照实验、热真空实验、点火悬停实验,还有着陆冲击实验以及振动实验等等这样一些实验的图像。很多时候,大家看到的是我们航天任务成功、大家激动欢喜的场面。但是对于我们设计师来说,其实最难忘的很多时候,是我们出了问题、遇到挫折的这些情况。
举一个例子。我们整个着陆器有非常复杂的推进系统,有发动机、有储箱,要带2000多公斤的推进剂。整个一套系统我们在地面都要做充分的验证,要做所谓叫“全系统试车”。我们的整个着陆器固定在一个实验台上,出于安全的考虑,我们在大概两三百米外的一个测试间。
在我们研制的过程中就出现过,在做全系统试车的时候,刚刚开始让发动机点火,几十秒之后,试车那边就着了火,推进剂四氧化二氮浓烟冒得很厉害,火苗都已经出来,当时我们大家也真的是都吓坏了,赶紧终止实验,浇水来灭火。
事后我们经过仔细地排查,发现其实是非常小的一个疏忽,但是这样一个疏忽造成了我们一套产品,包括推进系统的产品,包括我们碳纤维的结构都全报废了。在这之后,大家找到问题的原因,大概经过半年以后,我们再重新组织了新的一次试车,取得了圆满的成功。
为了这次试车,我们很多同事一个月都没有回家,全都扑在这个工作上。这些挫折,可能是我们航天设计师更加刻骨铭心的一些故事。
很多时候,我们说把航天器当做自己的孩子。其实我觉得,除了当成孩子,我们对我们的航天器心里还有一丝敬畏。
我们有一位最后要把航天器总装到一起的老师傅,总装班组组长刘师傅,他就说“航天器也是有感情的,你认真对待它,它上天就好好工作;如果你糊弄它,它到时候就会糊弄你”。我非常相信刘师傅的话,只要我们特别用心地对待工作,一定会有更多人类的前所未知能够被我们突破。
最后我想说,深空探测充满未知,也充满挑战,我喜欢。
谢谢大家。

