




2022-03-14 20:49

扫码打开虎嗅APP


本文来自微信公众号:LEAPX(ID:LeapX-),作者:邓雨眠,原文标题:《前瞻性设计探索:无人配送机器人的未来》,题图为设计方案汇总
在2019年初,LEAPX刚成立不久,我们接到了一个前瞻性项目,想要重新构思无人配送的可能性:目前无人配送机器人/配送车分为室内和室外两种,各司其职,而我们的客户行深智能,目标高远,希望能设计出一款无人配送机器人,打通室内外的场景,让配送机器人能够将货物和外卖直接从商户送到用户的家门口。由于外卖配送是这个机器人的主要目的,我们把这个项目在内部称为Lunch Box。

为了了解这个行业,我们深入研究了目前人工配送的情况,对快递小哥进行当面访谈,设计师甚至还亲自做了两天外卖员,亲身体会了配送工作的细节和艰辛。

室外的无人配送车,为了能高速稳定地在室外复杂路况行驶,一般重心低,轴距比较长,轮子直径也比较大。这也导致了车的占地面积大,转弯半径大,不灵活,对于进入室内行驶是个很大的障碍。而室内的无人配送机器人,为了方便在拥挤的室内、电梯灵活通行,一般做的占地面积很小,高度高,方便用户拿取货品。而这种高重心,小轮距的架构又让这种机器人在室外路况寸步难行。
怎样平衡这两个互相冲突的需求,就成了Lunch Box项目的关键。


在构思初期,我们发现婴儿车的大小和功能和配送机器人有不少类似的地方:他们都需要在室内外通行,对平稳度要求比较高,取放婴儿的人机交互和取放外卖也有相似之处。因此我们将外卖箱,婴儿车和iPad简单结合做成一个快速原型机,在室内外场景做了一些验证测试,得到了非常直观的体验和初步数据:比如机器人的高度对运行稳定性和取餐方便性的影响,轮子的大小是否足够应对各种路面,轴距宽度和转弯半径大致需要多大。
我们尝试通过“变形”来解决室内外两种运行环境的问题:在室外是一种低重心,宽轮距的形态,进入室内后变形成轮距窄,高度高的形态。这跟外卖员在室外骑车,到了室内就走路这两种行动模式有点像。
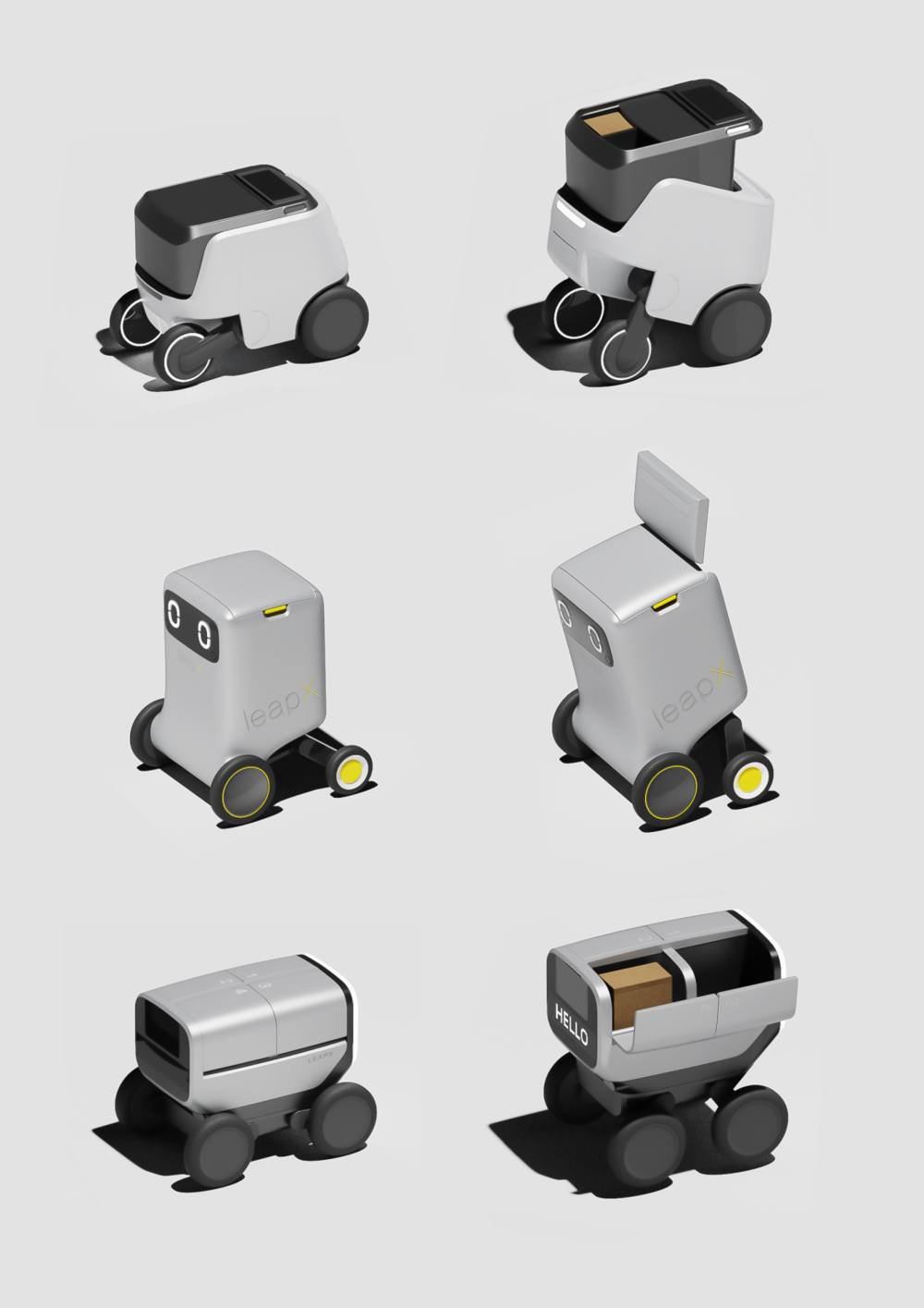
概念#1
巧妙利用一个简单的剪刀形结构完成“变形”,在减少轮距和占地面积的同时将货物抬高,方便用户拿取。



在室外模式下像一个小车,室内变形后则像一只坐着的小狗。
概念#2
小车整体高度相对较高,仅通过后轮收缩减少转弯半径,同时稍微抬高货物仓,带来一定倾斜角度,方便取餐。




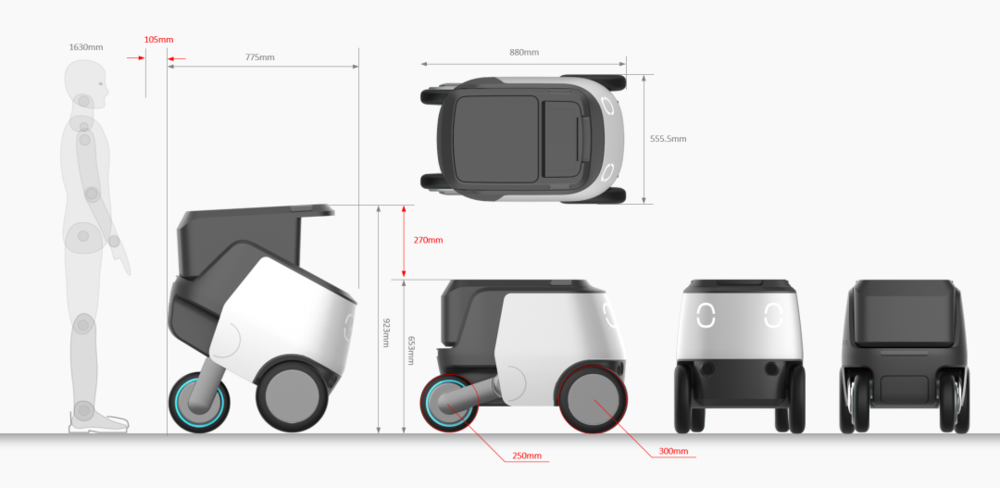
概念#3A
通过电机收缩前后轮,从而达到抬高货箱的目的,同时四个轮子相当于都有了独立悬挂,提高了越障能力。前方LED屏幕可翻开面向用户,方便观看与操作,运动过程中屏幕收起减少碰撞的风险。



概念#3B
在同样的变形方式下,我们还尝试了其他造型和开箱方式,区别于之前方案硬朗的风格,更具亲和力。

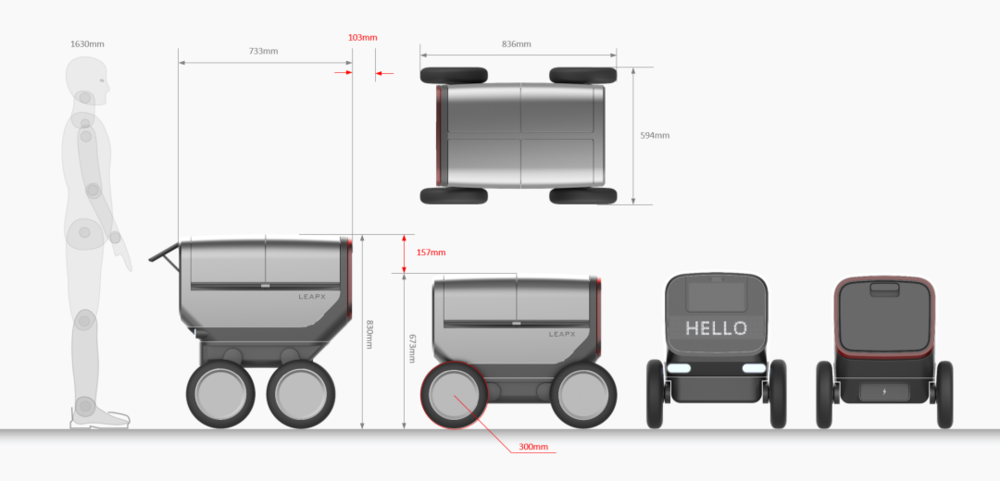
概念#4
概念四最大的优势在于能够保持底盘的稳定性,通过连杆结构将货物箱体抬起,而缺点则是只解决了取货人机问题,并没有解决转弯半径的问题。




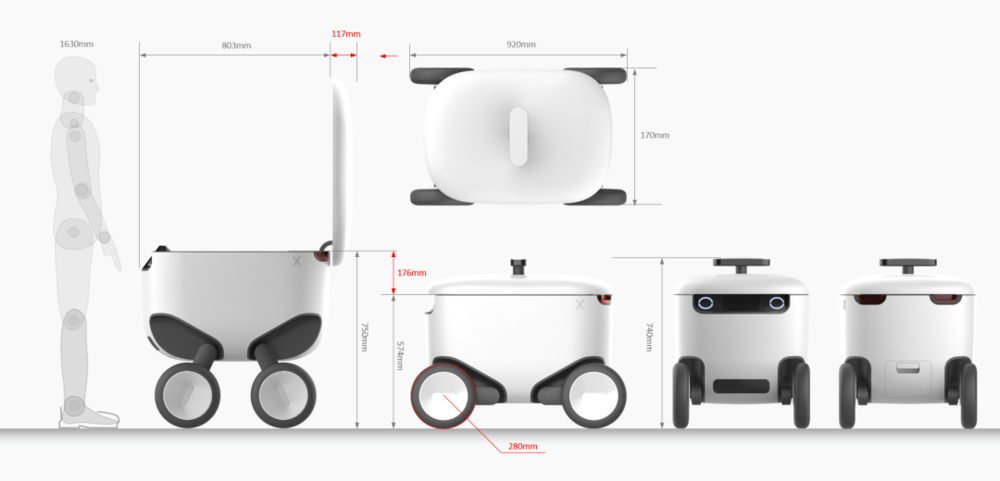
概念#5
此外防止餐盒撒漏也是需要考虑的重点,通过增加一个摆轮,不仅能够防止爬坡时餐盒倾倒,还可以让机器人越过路崖。



最左为休眠状态,LiDAR和相机等传感器都收进了机身内得到了保护。中间为运动状态,可见中间一圈黑色区域(传感器)伸了出来。最右为弹出快递状态。

概念#6A
概念六则是较为保守的方案,这个概念整体体积较大,方便一次存储更多货物,提高单次运输效率,同时操作屏幕位置较高,机器人无需变形则可让用户可直接操作。相对重心较高,户外稳定性和越障能力相对较弱。



概念#6B
同样为较保守的方案,重心低适合在室外高速行驶,同时整体体积较小,虽然牺牲了运输容量,但这有利于在室内狭窄的环境里灵活运动,前方为转向轮,通过伸缩杆可抬高鱼眼相机传感器,避免被遮挡。



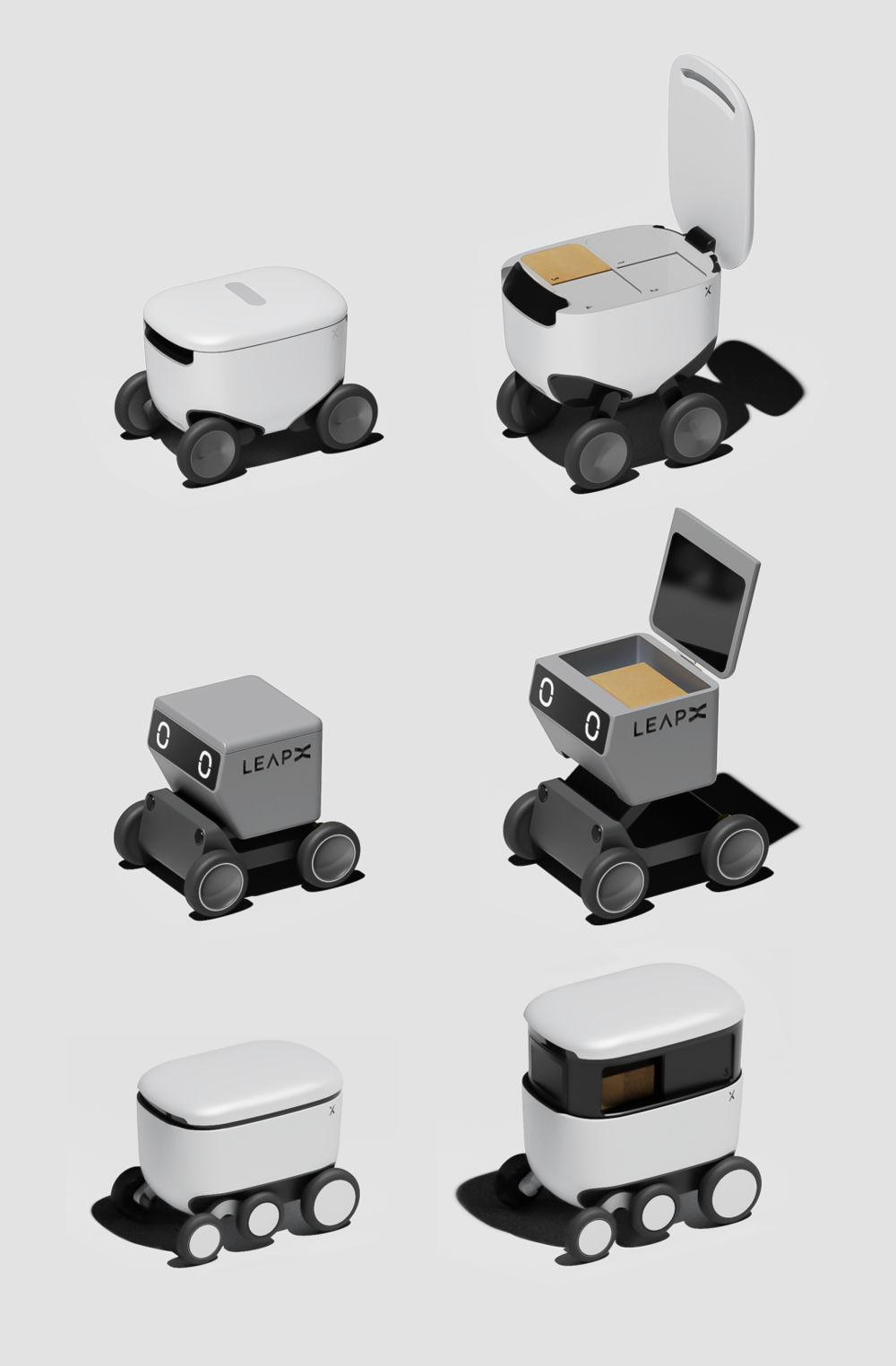
我们从中挑选出几款有深入设计价值的设计,制作微型模型以更直观地感受造型。

不同于其他简单的产品设计,配送机器人其背后的运行系统也是关键的考虑因素,合理的规划设计将提高整套系统的运行效率,这需要设计师跳出产品设计,从全局出发思考整体设计。
全自动化不可能一蹴而就,其中必定包括很长一段时间的人机配合的过渡阶段,在一些外卖订单密度特别大的场景(如工作日的写字楼),可以让送餐机器人将外卖交付至楼下固定取餐架/货栈上,即可离开去执行下一个订单,提升效率。



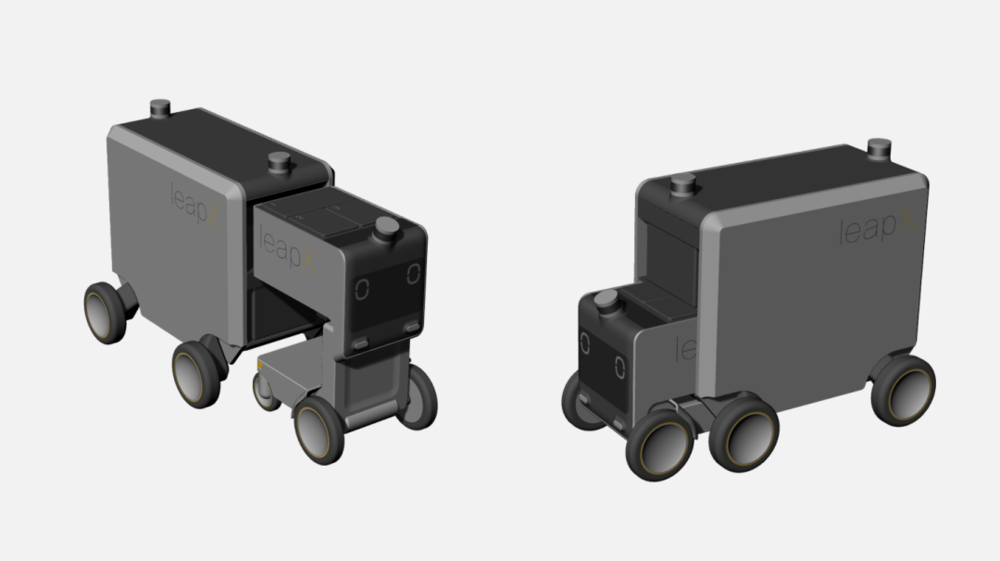
我们也设想了未来不同大小的配送机器人之间互相配合的场景,让大的无人快递车进行较远距离的运输,到了社区后再传递给小配送机器人(或者通过快递驿站来传递给小配送机器人),完成最后一公里到达用户门前的运输,整个过程都可以自动化完成,无需人工干预。

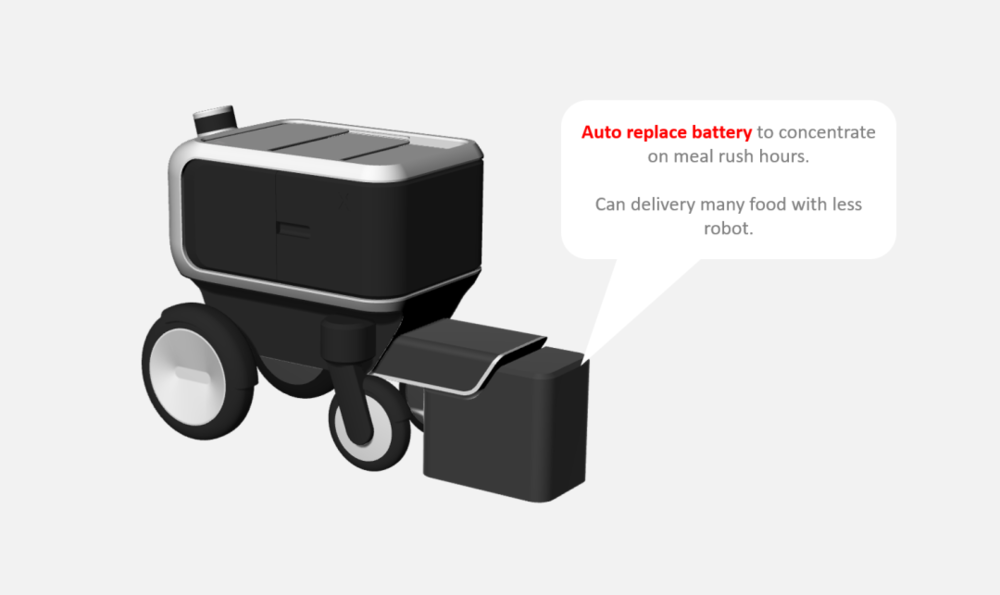
此外我们还设想了临时基站的可能,方便机器人在等待顾客时进行短暂充电,甚至可以进行自动更换电池,减少机器人的空置时间,避免在配送高峰期出现机器人短缺的情况,提高整个系统的工作效率。


不止整体系统需要考虑,机器人内部的存储空间也算是一个小系统,合理的、有目的性的空间规划将大大提高空间利用效率。
为了设计出合适的内部储物空间,我们购买测量了各种外卖打包餐盒,包括中餐、西餐、pizza、饮料等,并制作了储物箱模型,来测试各种外卖的储存。

根据测量结果,我们对整个储存箱做了模块化设计,分为外壳,内胆和隔板,可灵活搭配隔板来应对不同的订单数量/类型。整个内胆也可以取出进行清洗或更换。

为了适应人机配合的过渡阶段,让Lunch Box机器人能和现有的人工外卖配送系统无缝配合,我们也研究了现有美团、饿了么的外卖箱的尺寸,让外卖员能够更方便快捷地和Lunch Box机器人合作完成订单,比如可以将整个内胆及其内货物一起从机器人内转移到骑手包内。

得益于设计前的大容积载物考量,储物箱未来也可延展为其他功能模块的平台,可更换成安防、环境洗消、垃圾箱转运等多种服务模块,适应不同园区的需求,更为全能。
上述大部分“变形”概念方案的落地成本和难度都比较大,在项目的预算和时间规划内无法实现。因此在考虑再三后,客户选择了相对保守简单的方案,取消了变形,选择了一个相对均衡的车身比例来适应室内外运输场景。

虽然感到可惜,但我们作为设计方也需要兼顾项目的预算与时间规划,为客户量身定做合适的设计方案。
于是我们对概念方案七深入细化设计,先从人机工学与工程合理性出发,与工程师密切合作,优先对整机尺寸、屏幕位置尺寸、取货方式、LiDAR高度、轮距、充电位置等关键设计点进行反复优化调整,确定了产品的整体结构框架。





产品的整体结构框架确定之后,工程团队也迅速做出了功能样机。而后设计师持续与行深的工程师合作,优化造型设计,并合力解决制作过程遇到的问题。











最终在我们合作完成设计细节后,产品以布衣Citizen系列服务机器人亮相,于2021年在上海人工智能大会展出。


至此,这个前瞻性项目就告一段落了。目前整个无人配送行业依然在早期小规模实验测试,还没有成熟能大规模应用的方案和模式出现。未来还有着无限的可能性,希望我们的这些构想能抛砖引玉,给行业带来一些启发,也期望无人配送的未来能早日实现。欢迎大家踊跃留言,交流经验和想法。

Design Team:Siyoon Kim, Yumian Deng, Yufeng Shang
Visualization:Barney Mason, Kaihuang Chen, Yushen Wang, Yaokun Wu
Client:Xingshen Technology
LEAPX是由前DJI Mavic“御”系列无人机的主创人员创业成立的设计工作室
本文来自微信公众号:LEAPX(ID:LeapX-),作者:邓雨眠
