2022-09-22 07:40

扫码打开虎嗅APP

本文来自微信公众号:学术头条 (ID:SciTouTiao),作者:学术头条,原文标题:《Nature最新封面:无人机“建筑师”问世,半小时“盖”2米,或成未来火星建造者?》,题图来自:文章研究团队
在贪婪改造地球的同时,人类的火星梦也愈发强烈。
自 20 世纪 60 年代以来,人类已经对火星实施了 40 余次探测任务,但至今也没有将任何一个人送上火星。今年 3 月,被寄予厚望的马斯克声称,希望在 2029 年将人类送上火星。(此前的计划时间分别为 2025 年和 2026 年。)
然而,即使人类最终能够登上火星,稀薄的大气、寒冷的气候和漫天的沙尘等恶劣环境,也使得人类很难在火星表面长时间活动和作业,比如在火星极端条件下建造人类居住、活动场所等。
今天,来自伦敦帝国理工学院(Imperial College London)、瑞士联邦材料科学与技术实验室(Empa)的研究团队及其合作者,为未来的火星建造提供了一种新的可能——
他们受蜜蜂启发提出了一种新型建造方法,即利用无人机在飞行中建造 3D 打印结构,帮助人类在地球内(外)的任何地方建造任意建筑。
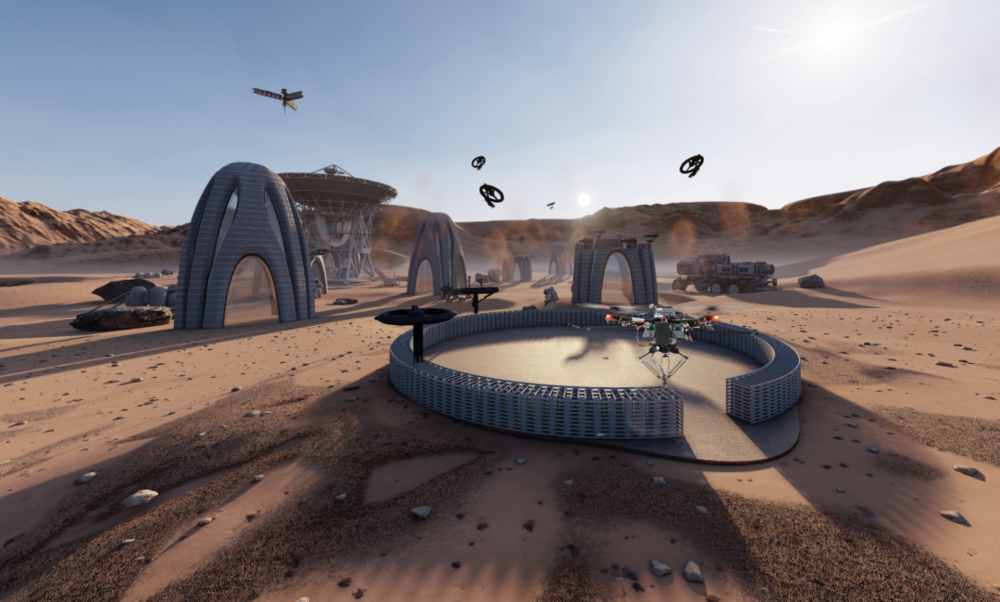
图|火星建造概念图。(来源:研究团队)
据介绍,这些 3D 打印无人机群由 BuilDrone(建造无人机)和 ScanDrone(扫描无人机)组成,前者在飞行过程中将建筑材料放置在建筑物表面,后者则主要承担质量控制任务,在飞行中测量前者的施工情况,并给出下一个施工建议。
最重要的是,这些无人机“建筑师”可以在人类监管下集群自行建造 3D 结构。这一重磅成果,于今日以封面文章的形式发表在最新一期的 Nature 杂志上。

图|最新一期 Nature 封面。(来源:Nature)
对此,论文通讯作者、伦敦帝国理工学院空中机器人实验室主任、Empa 机器人材料与技术中心负责人 Mirko Kovac 教授表示,“我们的解决方案是可扩展的,未来可以帮助我们在人类难以到达的地区(危险地区、极高处或有自然灾害风险的偏远地区)建造和修复建筑物。”
建筑师,要无所不及
当前,建筑构件的组装和自由形式的连续增材制造(additive manufacturing,AM),已被用于建筑的现场建造,因为相比于人类建筑人员,它们的安全问题更少,且生产力更高。
与基于组装的方法相比,自由形式的连续增材制造能够实现几何可变设计的灵活生产,从而进一步提高材料利用率并降低成本。
目前,用于现场施工的大型自由形式增材制造方法主要使用地面机器人和门式起重机系统。然而,这些技术需要将机器人硬件的尺寸扩大到比预期的制造围护结构更大的尺寸,这就使得并行操作变得困难,也会给建筑点的人和其他机器带来危险。
此外,由于这些大型系统需要直接连接到电源,它们很难在偏远、难以到达的环境中完成检查、维修或制造等工作,而且在这些环境中运输或安装大型基础设施也是不可实现的。
作为大型单机器人系统的替代方法,小型移动机器人团队具备更大的灵活性和可扩展性,可以构建比单个机器人本身更大的几何形状,同时具有在多个建筑点高效、并行地自适应分布的潜力。
然而,使用机器人团队进行建筑的研究还处于发展的早期探索阶段,当前主要集中在建筑构件的组装上。
此外,目前的多机器人增材制造方法主要使用移动地面机器人车辆,操作高度有限。而且这些移动系统同样受平台规模、最大建筑围护结构、并行制造能力和可访问性等诸多因素的限制。
但是,与目前的人工机器人系统相比,自然界中的“建筑师”(比如蜜蜂、白蚁和家燕等)却可以在飞行中建造巢穴,表现得非常灵活。
例如,一只燕子为搭建自己的巢穴,可以克服自身有限的载荷能力,在建筑材料来源处和未来巢穴点之间往返 1200 次;而白蚁、黄蜂等群居昆虫,则表现出了更强的适应性和灵活性。
特别是,由蜂群完成的空中建造展示了高效和直接的路径优化,在整个建造过程中降低了对先前建筑结构的依赖和限制。
受这些自然系统的启发,Kovac 团队及其合作者提出了一种名为“空中增材制造(Aerial-AM)”的集体建造新方法,使用不受束缚的移动机器人网络作为一个多主体系统来运行。
相比于传统方法,Aerial-AM(下图虚线框内)可以在人类难以到达的地点以不受区域限制的方式进行并行制造。
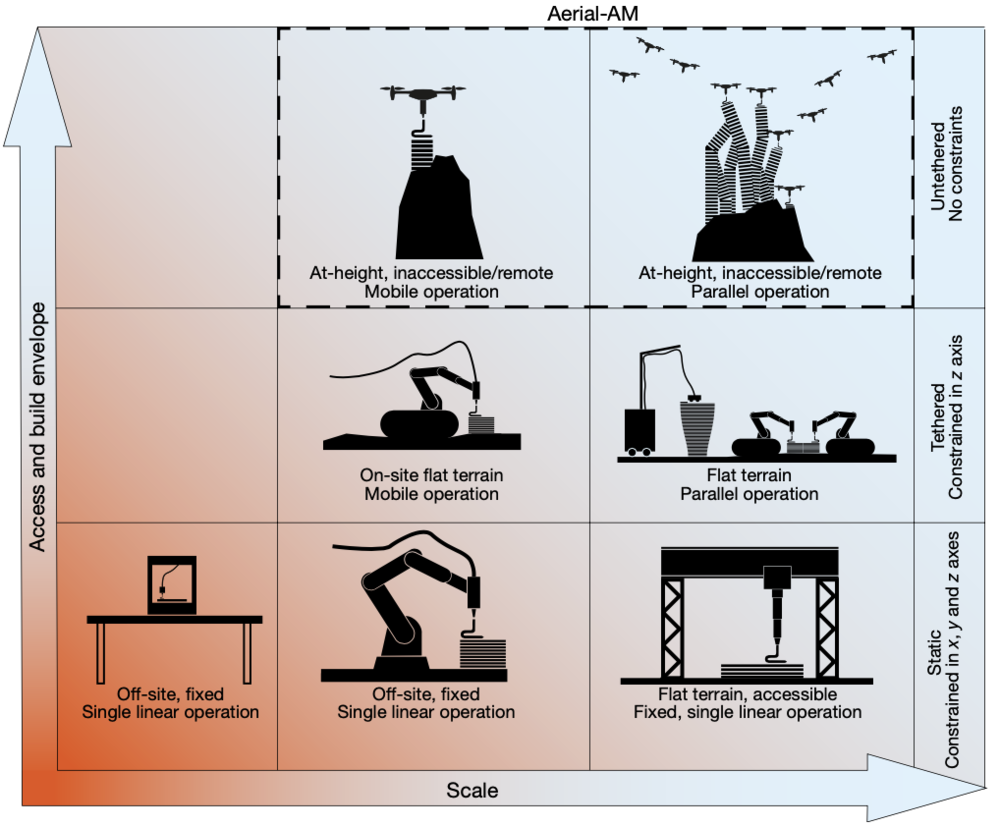
图|不同增材制造机器人平台的比较,红色向蓝色的渐变表示建造规模、灵活性和可访问性的改进。(来源:该论文)
无人机群根据预设程序系统工作,在飞行中完成建造任务。它们在飞行时是完全自主的,但受人类控制者监控。控制者根据无人机提供的信息检查建造进度,并在必要时进行干预。
29分钟,2.05米高
据论文描述,Aerial-AM 使用 3D 打印技术和路径规划框架来帮助无人机在建造过程中适应结构的几何变化。
无人机使用泡沫和水泥样材料建造了概念验证的圆柱体,在整个建造过程中,实时评估打印的几何图形,并调整其行为,以确保符合制造规格,建造精度达到了 5 毫米(在英国建筑要求中是可接受的)。
图|利用 Aerial-AM 方法的增量制造原理,可以通过部署多个 BuilDrone 来建造更大的结构。
其中,概念验证圆柱体包括一个使用聚氨酯泡沫材料 3D 打印出的 2.05 米高圆柱体(72 层),以及一个使用定制设计的结构胶凝材料建造的 18 厘米高圆柱体(28 层)。

图|无人机 ScanDrone(小)、BuilDrone(大)和 3D 打印的泡沫结构,BuilDrone 打印 1 层需要 24 秒,打印 72 层共计耗费 29 分钟。(来源:研究团队)
作为一种自主的、可扩展的、灵活的增材制造方法,Aerial-AM 可适应几何类型、规模和机器人数量的变化。
使用 BuilDrone 进行材料沉积,使用 ScanDrone 对打印结构进行环内定性评估,对 2.05 米高的高圆筒进行打印,证明了 Aerial-AM 方法制造大尺寸几何图形的能力。
此外,其他制造试验证明,Aerial-AM 具有精度高(5 毫米位置误差)、并行能力强等特点,可以有效地打印各种几何结构。
虽然这些实验成功验证了 Aerial-AM 的可行性,但它们只是探索使用空中机器人进行建筑的潜力的第一步。
要想使用此次研究提出的方法实现建筑几何结构的全面制造,需要机器人技术和材料科学方面取得重大进展。特别是,支撑材料的沉积、活性材料的固化以及多机器人之间的任务共享,有待进一步取得突破。
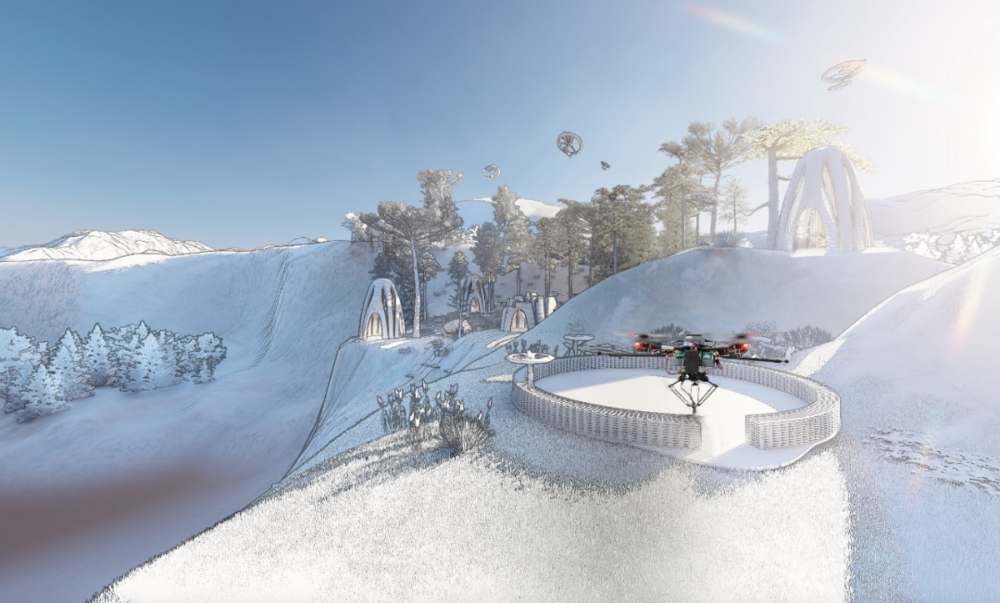
图|森林建造概念图。(来源:研究团队)
同时,结构有效的几何结构的设计和工程,以及打印几何结构行为的系统分析,仍然需要进一步的研究。
为了使研究成果走出实验室,研究团队计划在未来为 Aerial-AM 增加一个多传感器同步定位和测绘(SLAM)系统与差分全球定位系统(GPS),从而提供一个高精度的户外定位服务。
同时,建筑规模的增大需要材料和电池补给在未来实现自动化;也需要新的分析方法,来进一步评估分布式制造相对于制造对象的规模和所使用的机器人平台的效率。
尽管如此,该研究提出的系统实现了自动 Aerial-AM 的概念验证,并可能会为使用集体多机器人增材制造系统完成建造提供基础。
未来,Aerial-AM 或将成为支撑偏远地区住房和重要基础设施建设的替代手段。在这些地区,全球变暖、自然灾害和恶劣气候频发,使得现有建筑方法遭遇了前所未有的挑战。
在接下来的工作中,为进一步验证这一解决方案,研究团队将与建筑公司合作,继续探索这一方案的建造和修复能力。
最后,一起欣赏下这些“建筑师”们的劳动成果吧。

论文链接:https://www.nature.com/articles/s41586-022-04988-4
本文来自微信公众号:学术头条 (ID:SciTouTiao),作者:学术头条

 04:53
04:53







 03:42
03:42


 13:48
13:48
 20:51
20:51
 20:38
20:38
 26:54
26:54
 10:09
10:09
 04:18
04:18
 05:20
05:20
 11:36
11:36