2019-04-25 17:59

扫码打开虎嗅APP

头图来自:东方IC,本文来自微信公众号:造就(ID:xingshu100),作者:造就Talk的编辑们,主讲人:罗均
我是来自上海大学无人艇工程研究院的罗均,今天跟大家分享的题目是《水面之下》。
这是南海岛礁水面之下的地形地貌图,我们叫海图。
中国有300万平方公里的海域面积,在这么广阔的海域之下,海图对船舶航行,甚至对整个国家的海洋经济和国防安全都是至关重要的事情。
对海图的测量,我们一般通过海测船来进行。但是海测船吃水比较深,比如说海巡01,海巡166,以及我们的李四光号和钱学森号海测船。
而中国300多万平方公里海域里面有很多岛礁,据估计,东海有3500多个,南海有1700多个。

可是呢,有多达数十万平方公里的海域深度还不到5米,在这些岛礁周边测绘海图,用海测船显然是不行的,但是岛礁周边的海图对中国的海洋权非常重要,这怎么办?
因为我们团队从事的是机器人的基础研究,所以我们采用了无人艇来解决这个问题。
无人艇吃水很浅,能够实现自主航行、自主避障、自主地进行岛礁测绘。通过无人艇上的声纳发射声波到海底或者暗礁再反射回来,再通过专门的声呐测绘法,海底的地形地貌就出来了。
但是,无人艇对岛礁的测绘,有几个技术上的难点。

其中一个就是岛礁周边的水流紊乱,裂流、涡流都很多,给无人艇带来很大的干扰。因为声纳测绘,要求无人艇必须走直线。但是在岛礁的周边浪又很大,走直线特别困难。需要用抗涌流的控制方法让它走得准。
那么正常情况下怎么抗涌流呢?
比如说无人艇在岛礁周边测绘的时候,一个大浪过来,它会偏离这个航线,但是通过无人艇上的传感器我能测出来它的偏移量,根据偏移量的大小施以一个反作用力,让它回到航线上面来。
但是如果是在海上航行的话,这个浪过来之后造成了一个偏移量,而下一个浪的大小还不知道,所以这个偏移量带有一些盲目性,怎么办呢?
我们发明了一个新的方法,就是通过无人艇上的雷达将它周边的海浪信息收集起来,建成一个动态模型,叫扰动空间。
无人艇上面有很多的传感器,把它的姿态测出来,形成一个姿态空间,姿态空间和扰动空间都是不停变化的,我只要把扰动空间和姿态空间对应起来,找到一个映射关系,我就知道该怎样来控制无人艇的纠偏量,达到走得准的效果。
这个是第一个需要克服的关键问题。
第二个关键问题就是避障问题,我们对静态目标避障是很容易的,通过雷达,激光测定它的位置,用一定的算法就可以避开。
但是在海上的时候,有很多正在航行的船舶,包括无人艇,像这种避障我们怎么办?
我们人在奔跑的时候,遇到另一个人跑过来,我会估计自己的速度、方向,然后还会估计对方的速度和方向,然后通过大脑的判断和反应,就可以避开他。
那么海上的船舶也是利用这个原理,通过无人艇上的传感器和雷达,把对方的信息估算出来。
但是因为无人艇在海上的航行的时候,它的速度和方向都是有误差的,通过误差信息去估计对方的误差信息,会有更大的偏差。
所以还需要将这两方的误差信息搞一个误差锥,在两个锥体没有交集的时候,我们才能实现移动避障。

第三个难点是这样的,因为无人艇的航行距离只有几百公里,如果进行远海航行作业的话,必须要跟母舰配合着使用。
可是在海上,正所谓无风三尺浪,三级四级的海风是很常见的,无人艇作业完成了之后,再回到母船一直是很困难的事情,美国也在研究这方面的问题。
大船晃得很厉害,无人艇也晃得很厉害,让两边的吊钩结合对接,把无人艇吊上来,难度非常大。
我们想了一个新方法,在无人艇上做一个抛射的牵引绳,需要回收的时候,就把牵引绳自动抛到母舰甲板上面来,工作人员就能很容易回收了。在扰动的情况下做回收,这个方法的效果还是比较好的。
以上这些是无人艇遇到的三个难题。

以色列是全世界无人艇发展最快的国家,它有很多型号的无人艇,已经列装了63个型号,还有25个型号正在研制,美国也很重视无人艇的研发。
我们呢,根据前面的三项技术,也研制了7个型号的无人艇。
取名“精海”的意思,一个是发挥“精卫填海”的精神,还有一个是精准执行海上任务。
2013年我们的精海无人艇随着海巡106到南海岛礁测绘,在西沙群岛,永兴岛,南沙群岛赤瓜礁,美济礁和永暑礁,都进行了大量的测绘。
特别是对永暑礁的测绘,后来成为那个填海造岛的数据一个支撑。

这个是我们在南海对一个军港码头的测绘,因为军港码头周边有好多的碍航物,军舰没有办法靠岸,碍航物在什么地方又不知道,我们对周边方圆50米进行了一个扫测,找到9个疑点,通过扫测到的坐标,把这个碍航物给清除掉,就可以停泊大型的军舰。
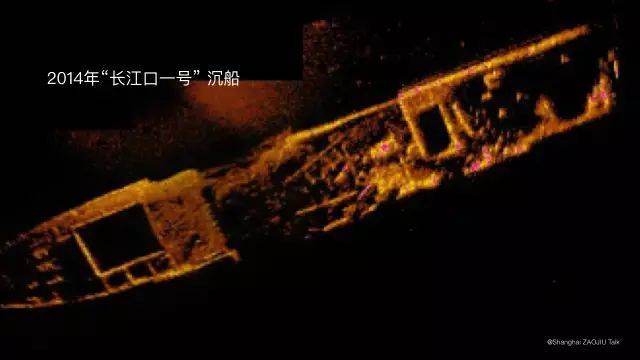
这是我们的无人艇在长江口找到的一艘沉船,“长江口一号”。大家都知道,沉船的地方,一般都是水域条件比较差的地方,所以船才容易沉。
大船测的时候肯定会遇到很多问题,反倒是无人艇在其周边扫测,找到了这艘沉船。

以前雪龙号科考船在南极罗斯海科考的时候,因为不了解周边的海图信息,没有办法抛锚,不得不采用漂航的方式,船舶无法熄火,需要耗费极大的成本。
2014年我们把周边280公里的海图全部测好,根据这个海图,找了一个比较好的抛锚点,所以2015年雪龙号再去的时候,就可以抛锚了。
我们知道东海的岛礁最多,而且都是岛礁群,以前我们都是通过卫星遥感的方式获取岛礁周边的一些海图数据。
卫星遥感得出来的数据误差特别大,给我们的船舶航行带来很多困难。
所以我们想把东海的一部分岛礁群通过无人艇的方式测绘好。

大黄莽礁的测绘情况。
这两个礁之间,蓝色表示水比较深的地方,这个是卫星遥感的得到的数据。
如果从这个水深的数据来看这里船能过得去的,但是实际无人艇把周边测完之后,显示的全是红色,越是红色的地方,水越浅,最浅的地方只离水面0.85米,如果按照卫星遥感得到的数据航行,会带来很大的危害。
中国有7千多个岛礁,很多地方都是空白的,所以这块的工作量非常大,通过无人艇测绘获得海图,我们把岛礁周边的数据都补充起来,生成一个三维的水深图,能对海洋安全起到很好的促进作用。
然而单个无人艇的作用是有限的,采用蜂群探测,用一群无人艇来对执行任务的话,它的作用就会很大。
比如说我们海里的鲨群,我们空中的蜂群,我们地面上的这种狼群。它们的单体能力都有限,但是群体的作用却非常大。
这里面就涉及到人工智能和群体智能的问题。
比如说,当一群无人艇去攻击对方的无人艇时,就像我们打篮球一样,单对单时如果感觉对方能力比自己强,那么另一个队友就会从旁协防一下,如果一个队友还不够,那就再过来一个包夹一下,打完之后又分散去对付另外的目标。
无人艇也是一样的,我们也是可以用一种云技术,来同时控制三艘无人艇。这里面就涉及到群体智能,和博弈方面的理论。
因为无人艇其实是空、天、地、海无人驾驶系统里面一个典型的代表。我和我的团队想致力于无人驾驶系统的研发,这是我们整个团队的梦想。
本文来自微信公众号:造就(ID:xingshu100),作者:造就Talk的编辑们,主讲人:罗均,
上海大学机电工程与自动化学院副院长,上海机器人研究所所长
 04:31
04:31
 05:49
05:49
 02:55
02:55
 05:25
05:25
 17:43
17:43
 10:44
10:44
 07:43
07:43
 05:54
05:54
 05:14
05:14
 12:24
12:24


