2022-08-12 16:40

扫码打开虎嗅APP

本文来自微信公众号:新智元 (ID:AI_era),编辑:Aeneas、好困、David,题图来自:视觉中国
8月10日下午,一辆小鹏P7在宁波机场路高架(自南往北方向)撞上了一辆前方停放的小车和该车驾驶员,造成小车司机不幸死亡。
直击事故现场
视频显示,在宁波某高架桥路段,一辆抛锚的故障车停在最左侧车道,司机和同行人员正在紧邻中央隔离带的最内侧车道处理车辆问题。
在黑衣司机去车后摆放三角警示牌时,一辆小鹏P7快速撞了上来,车后方的黑衣男子被撞飞后重重摔在路上,故障车辆被撞出6至7个车位距离之后两车才停下。
最终,事故导致一人死亡,被撞车辆的尾部已经被严重撕裂,小鹏P7的车头也发生变形。

视频中小鹏P7从撞击开始到车辆完全停下,刹车灯疑似一直没有点亮。
根据车主王先生的自述,自己买小鹏P7已经一年多了,事故发生时开启了辅助驾驶功能,车速80km/h。
车辆在撞击前并未提醒接管,或是发出过任何警告,而自己当时正巧在分神。
从视频中可以看到,当时路况良好,光线充足。汽车的辅助驾驶系统没有给出任何提示,就径直以高速撞向了静止的车辆。

另外,8月10日,一段疑似涉事驾驶员的微信聊天记录被曝光,“我辅助驾驶高架上撞人了”“我快哭了”“我撞了后意识到来不及了”“我就擦伤”“这次刚好分神”。
聊天记录显示,车主在发生车祸之前开启了车辆的LCC车道居中辅助功能,并以80km/h的速度巡航行驶,但以前有预警的提示系统在当时“完全没识别”,该聊天记录中还说道“千万别相信辅助驾驶了”。
毫米波雷达的“克星”:静态目标
在红星新闻的采访中,肇事车主本人称,他的小鹏P7目前已经更新到XPilot 3.0系统,为此他额外花费了3.6万元。
该系统采用的是视觉为主的融合感知方案,搭载了13个摄像头、5个毫米波雷达和12个超声波雷达。
其中,底层算力来自英伟达Xavier,可以达到30TOPS。

值得注意的是,同样是P7,但是不同的车型在配置上差异巨大。而通常媒体宣传的性能基本都是顶配,很有可能会误导购买其他车型的消费者。
实际上,目前L2辅助驾驶系统的主流配置一般是没有激光雷达的,主要依靠毫米波雷达+摄像头(即视觉)作为识别设备。
静态目标可能成为最大的安全隐患之一,换句话说,对于毫米波雷达来说,静态目标就是“克星”级的存在。
为什么毫米波雷达在L2辅助驾驶系统中,对静态目标的识别总是不尽如人意呢?
从逻辑上说,在行驶时,毫米波雷达显示画面和人眼所见场景大致是类似的,前方出现有个庞大静止目标,不应该导致无法感知的问题。其实不然,高速状态下对静止物体的识别就是一个特例。
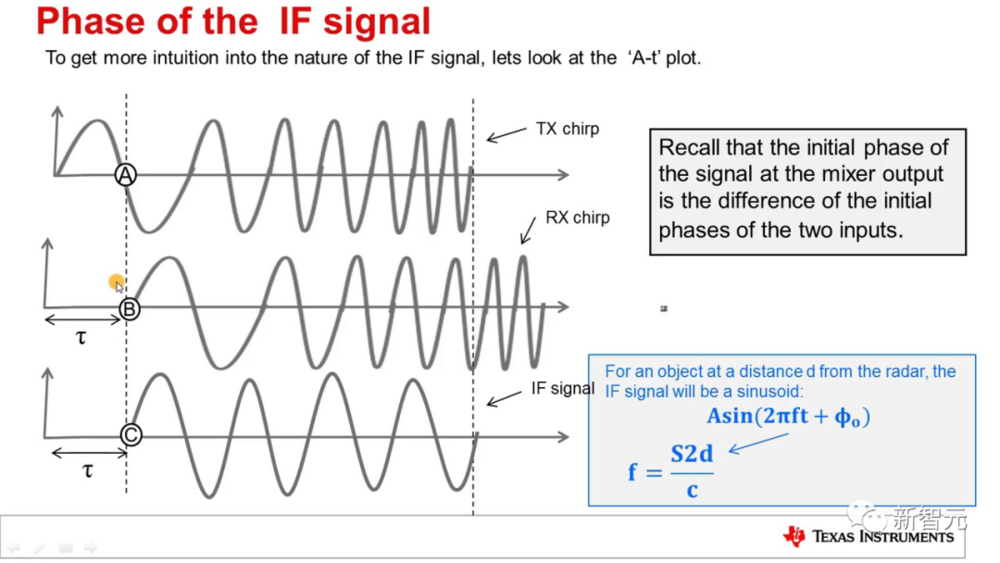
从工作原理看,毫米波雷达主要是依靠多普勒效应来感知移动目标。通过发射毫米波段的电磁波,利用障碍物反射波的时间差确定障碍物距离,利用反射波的频率偏移确定相对速度。
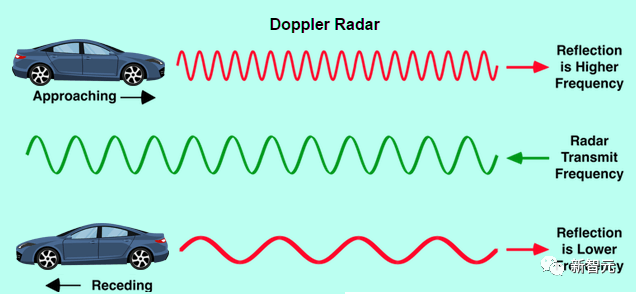
毫米波雷达对于动态vs动态目标时,最容易识别,如果有静态目标,则识别难度陡增。
原因在于,静止物的反射波没有相位差,所以静态目标的信息很容易和附近的干扰目标信号掺杂在一起,需要算法过滤和分辨目标。
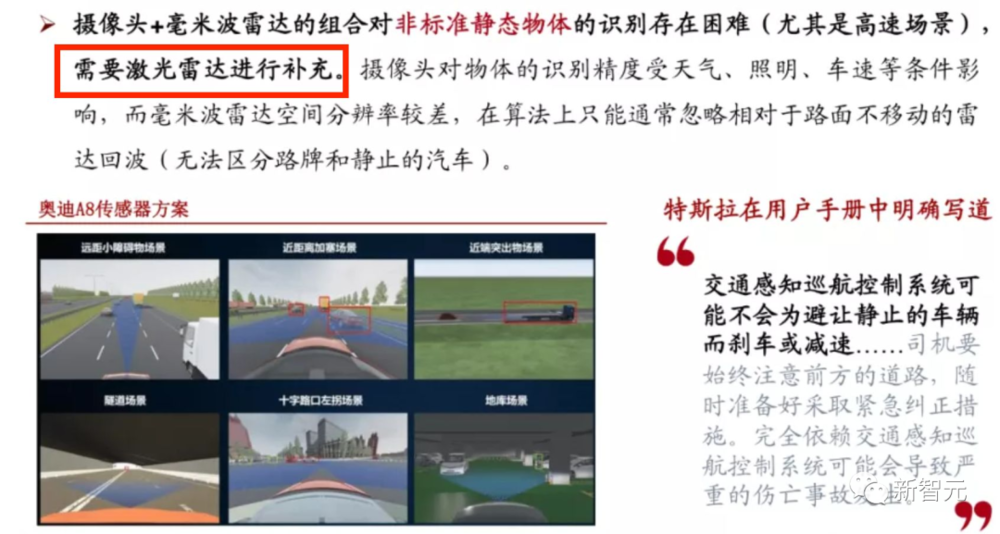
目前在分辨算法上,已经能够做到迅速识别静态目标,现在的主要难点是,毫米波雷达缺乏目标的高度信息,而且往往分辨率不足。
前者可能导致车辆分不清前方的静止目标是个路牌,还是停着的一辆车,而后者可能导致两个距离很近的目标,其回波会混在一起,难以辨别彼此。
而且,这种信号掺杂造成的错误反馈,可能导致算法对目标性质的误判。比如把前方车辆当做干扰信号错误地过滤,这时如果不能及时手动干预驾驶,或距离太短来不及反应,怕是只能眼睁睁看着碰撞事故发生了。
来源:招商证券
事后,宁波民生e点通也针对小鹏P7辅助驾驶功能的静止物体识别能力,做了一个测试。
安全起见,地点地点选在了一个人烟稀少的地下停车场。
从结果来看,在三次测试中,小鹏P7都没有成功识别到障碍物。
不过,相比来说,这个环境确实严苛了不少。光线不如室外的白天充足,而且作为障碍物的泡沫箱也比较小。

AEB未激活?
国内某车企的技术工程师推断称,最终导致事故发生的原因应该是LCC辅助驾驶的主动刹车AEB功能出现了问题。
AEB即自动紧急制动系统,全称是Autonomous Emergency Braking。AEB能够使得车辆在行驶时自动监测车辆与前方车辆、障碍物或者行人的距离,小于安全距离时,AEB就会自动采取不同程度的制动,甚至完全刹停。
现在的自动驾驶辅助功能,无可避免地会有失效的概率存在。从目前的智能驾驶算法来说,某些传感器、雷达的计算精度还没有那么成熟,可能存在有些时候“分神”、没有进入工作状态的情况。
而即使传感器和雷达进入了工作状态,也未必能够及时地成功完成静态识别。
针对目前的AEB系统,微博网友远方有个LiuS也进行了比较全面的分析。
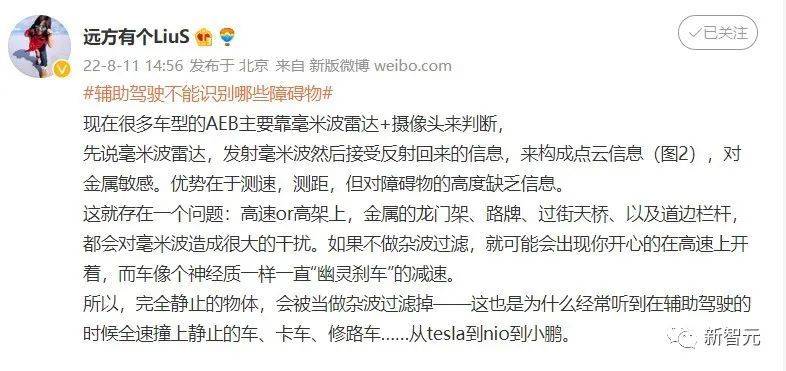
毫米波雷达会发射毫米波然后接受反射回来的信息,来构成点云信息。它优势在于测速、测距,但对障碍物的高度缺乏信息,而且容易被金属干扰。
因为金属的龙门架、路牌、过街天桥等都会对毫米波造成很大的干扰,因此需要做杂波过滤。而这里就有个bug——完全静止的物体,会被当做杂波过滤掉。
这也是为什么开启辅助驾驶的车经常会全速撞上静止的车。
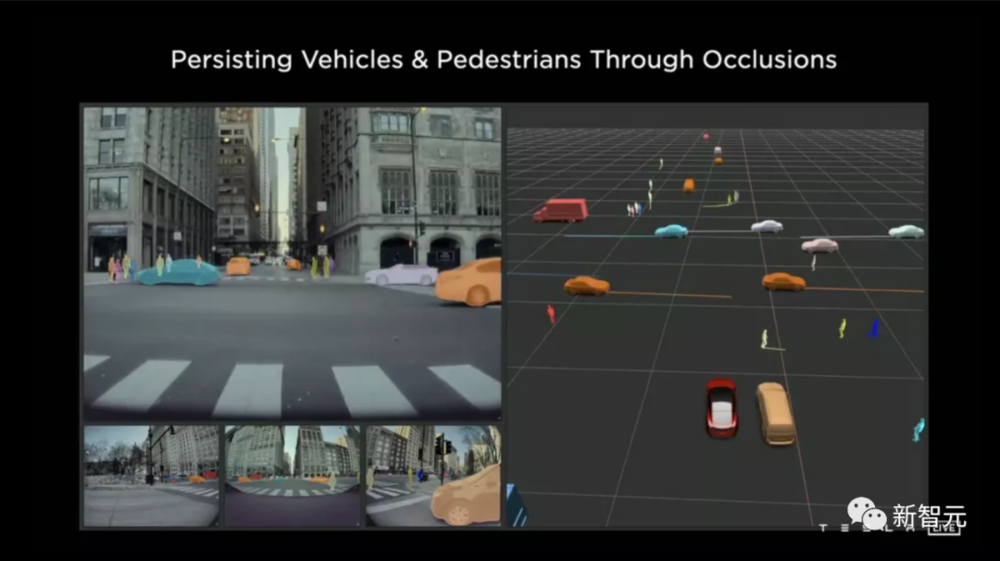
为此,自动驾驶系统还有第二重保障——摄像头。
现在的摄像头感知,普遍是在用神经网络的深度机器学习。用大量的图像信息喂给AI,教AI识别这些都是什么。
但摄像头感知需要识别的时间,在车速太快的情况下,未必能反应过来。而且路况往往是复杂的,前方的东西如果超出了AI的理解范围,就可能被摄像头漏识别了。
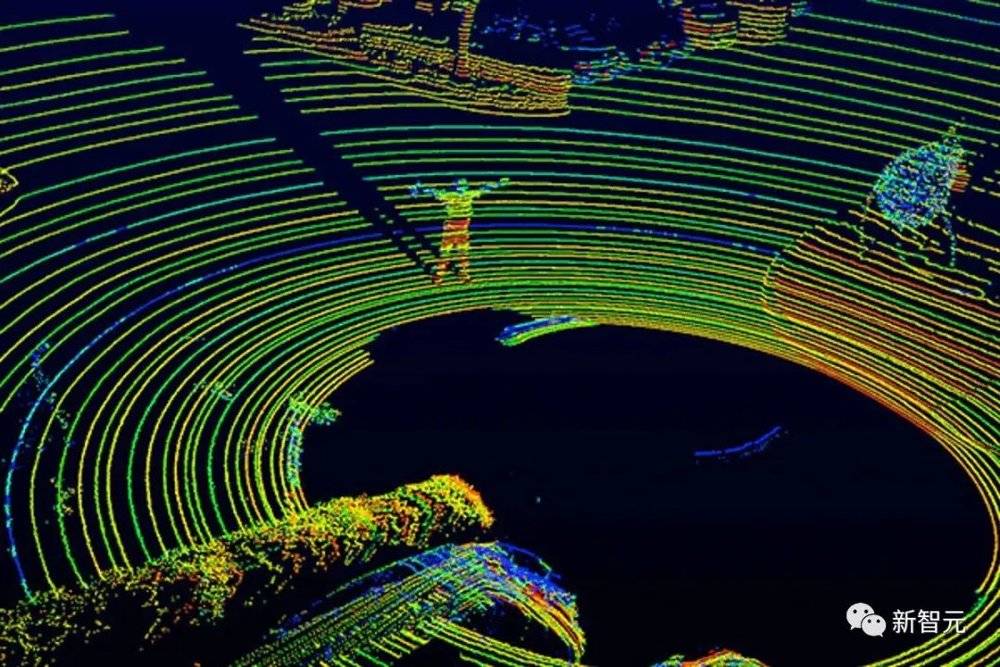
自动驾驶的第三重保障,就是激光雷达。
激光雷达可以提供三维点云,也就是带距离、位置、高度、速度的丰富信息。
不过,由于成本和技术的原因,目前大多数车企都没有为车辆配备激光雷达。
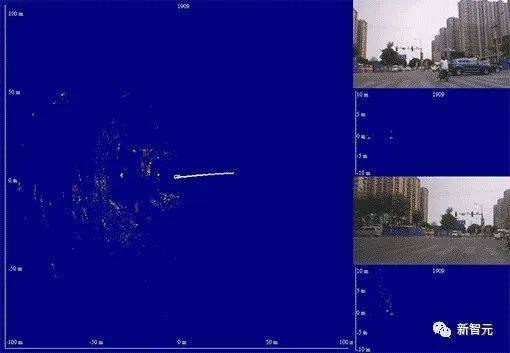
在这次事故中,毫米波雷达至少有200米的探测距离,然而在车辆以80km/h行驶时,车辆上的毫米波雷达、超声波传感器、高感知摄像头都未及时识别出前方的危险。
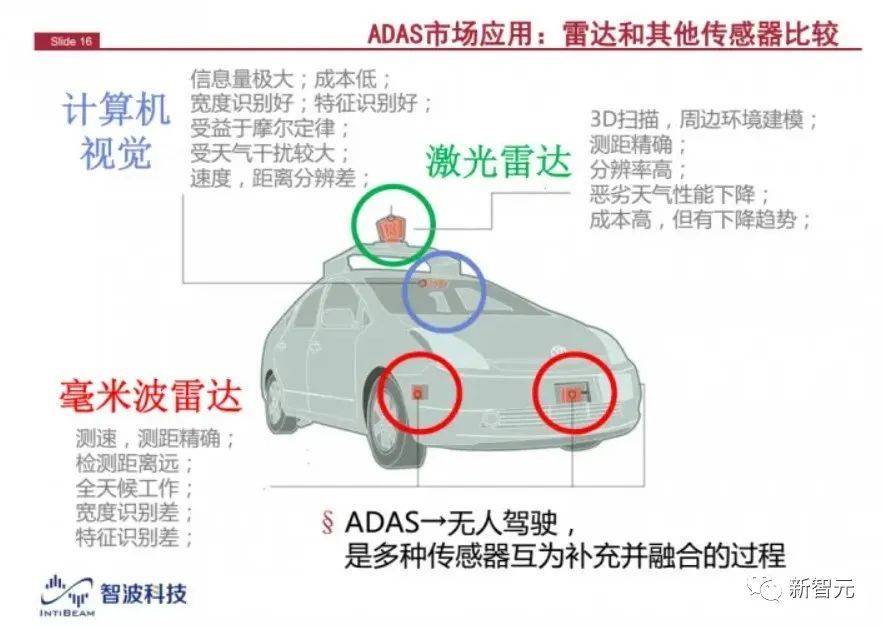
来源:智波科技
知名媒体42号车库表示,目前因为辅助驾驶而引发的重大安全事故,原因几乎如出一辙:弱势场景下系统失效 + 驾驶者的分心驾驶。“了解系统的弱势场景,避免弱势场景下使用辅助驾驶,并且保持驾驶注意力是对自己和他人生命的负责。”
资深汽车博主PS3保罗也提醒说:现在各家对静态物体的识别,都不能做到万无一失,所以开车时一定要注意路况。

再说一遍,这不是自动驾驶
针对这次的事件,小鹏汽车回应称:
经核实,8月10日下午,宁波一车主驾驶车辆与前方检查车辆故障人员发生碰撞,发生人员伤亡。我们为本次事故中不幸离世的遇难者感到悲痛和惋惜。目前交警部门已经立案处理,门店已第一时间已前往现场协助处理。我们将全力配合相关部门进行事故调查,持续跟进后续结果,并协助客户处理后续相关事宜。
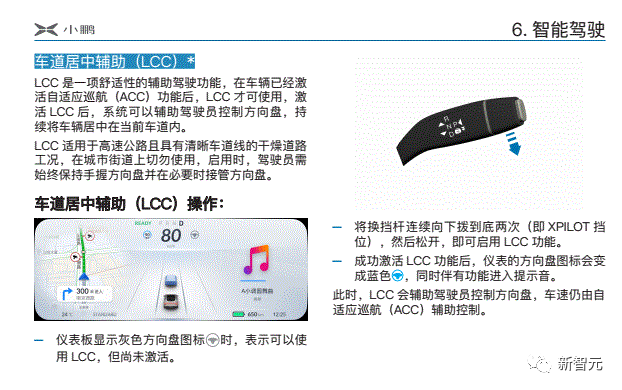
公开资料显示,小鹏汽车的辅助驾驶 XPilot 包括车道居中辅助(LCC)、自适应巡航(ACC)和自动变道辅助(ALC)等功能。其中,LCC 主要通过挡风玻璃上的摄像头对路上车道线进行检测,辅助控制方向盘,使车辆保持在两条车道线中间行驶。
小鹏汽车官网显示,车道居中辅助(LCC)是一项舒适性的辅助驾驶功能,激活该功能后,系统可以辅助驾驶员控制方向盘,持续将车辆居中在当前车道内。该功能适用于高速公路且具有清晰车道线的干燥道路工况,在城市街道上切勿使用。
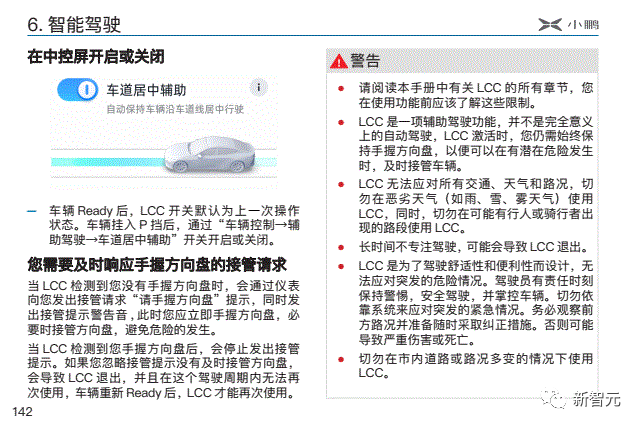
小鹏汽车在用户手册中提及,LCC 是一项辅助驾驶功能,并不是完全意义上的自动驾驶,LCC功能启用时,驾驶员仍需始终保持手握方向盘并在必要时接管方向盘。
此外,LCC 是为了驾驶舒适性和便利性而设计,无法应对突发的危险情况。驾驶员有责任时刻保持警惕,安全驾驶,并掌控车辆。切勿依靠系统来应对突发的紧急情况。务必观察前方路况并准备随时采取纠正措施,否则可能导致严重伤害或死亡。

而这次事故需要我们牢记的是:自动/辅助驾驶系统永远不可能做到100%零事故,在开车时,请永远不要放开方向盘上的手。
参考资料:https://weibo.com/1642634100/M0xnUambl?refer_flag=1001030103_
本文来自微信公众号:新智元 (ID:AI_era),编辑:Aeneas、好困、David

 06:00
06:00









 00:23
00:23
 14:11
14:11
 05:04
05:04
 05:49
05:49
 02:05
02:05
 06:59
06:59
 11:12
11:12
 17:45
17:45
 09:06
09:06


