2016-03-01 18:22

扫码打开虎嗅APP

谷歌一向标榜软件比人类司机靠谱,但谷歌无人驾驶汽车这次真的摊上大事儿了。用虎嗅今天一篇文章的标题来表达,谷歌无人驾驶车这次在加州撞上公交就应该负全责,简直“太蠢了”。
无人驾驶车觉得,对方会让我先走,可惜人类也这么想
昨天,一位名叫Mark Harris的科技作者在其Twitter上爆料,一辆谷歌改装版雷克萨斯SUV于2月14日在硅谷山景镇与一辆低速行驶的公交相撞。根据Mark Harris贴出的加州车管局文件,当时谷歌无人驾驶车正在国王大道(El Camino Real)最右侧的车道上自西向东行驶,行至十字路口时,汽车紧靠车道右侧准备转弯,结果正遇上路边排水道维修,用以堵水的沙袋挡住了去路。无人驾驶车检测到障碍后决定回到车道中央绕过沙袋,此时一辆公交正从左后方缓缓驶来,于是无厘头的事发生了,无人驾驶车也好,车内司机也好,都判断对方会让行,偏偏公交司机也这么想,他们就这样,缓缓地,悲剧地,相撞了……所幸事故没有造成人员伤亡。
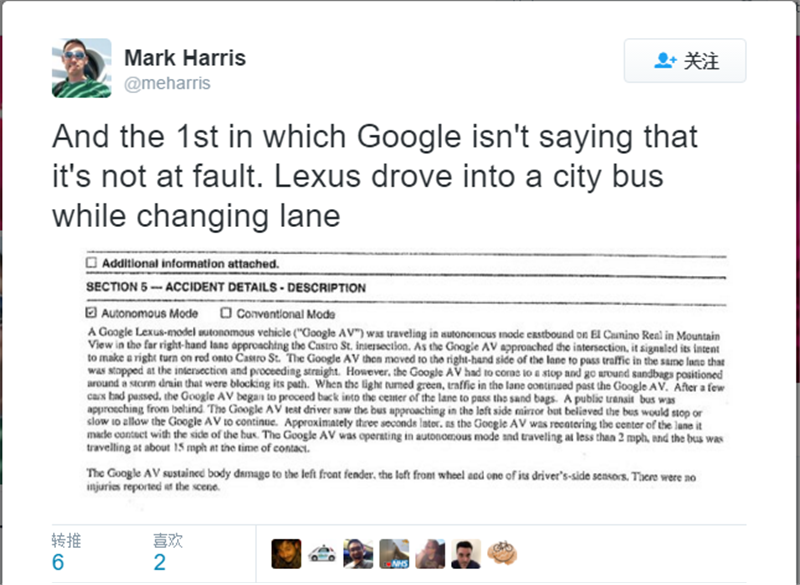
如果按照谷歌以往的处理方式,恐怕会把责任推得一干二净。在过去6年中,谷歌无人驾驶汽车总共行驶了274万公里,遭遇事故11起,但还没有一起谷歌认为是无人驾驶技术导致的。不过此次事故毕竟涉及无人驾驶车自身的误判,谷歌也只好承认他们将承担“部分责任”。
根据The Verge获取的谷歌无人驾驶汽车月报,谷歌无人驾驶车也是最近才采用了“右转时紧靠车道右侧行驶”这一规则,目的就是在右转受阻时,方便后方直行车辆继续行驶。本次事故中,无人驾驶车确实曾在转弯处等待数辆汽车通过,然后才缓慢倒车,当公交车从后方驶来时,无人驾驶车判断,既然自己在公交前面,公交就应该会让行。谷歌在月报中写道:
这也是人类日常行驶中经常遇到的困境——我们总是试图预测对方的动作。本案中,我们确实应该承担部分责任,因为如果我们的汽车没有向车道中央移动,事故就不会发生。但即便如此,我们的测试驾驶员也判断公交会减速或停车让行,这样我们的汽车就会有充足的空间倒车。
言下之意很清楚,即使是人类司机遇上同样的状况,也会撞车,谷歌似乎还是不愿承认人类比机器聪明。
算法或许没有比人类更靠谱,但至少可以保证不“主动”撞人
算法和人类,谁是更靠谱的司机?此前的争论似乎大多都在理论层面,比如算法无法应付人类司机不按常理出牌的状况,又如人类司机容易分心而算法不会等等。
今年1月初,弗吉尼亚理工大学交通学院发布了一份无人驾驶车报告,他们在对总行驶路程达340英里的3,300辆汽车进行跟踪监测后发现,全国车辆事故率为4.2起/百万英里,而无人驾驶车的事故率仅为3.2起/百万英里。这显然是谷歌想要看到的结果,有趣的是,弗吉尼亚理工官网的一篇报道显示,这项研究正是由谷歌委托的。
然而,2015年10月的一项研究却给出了完全相反的结果。密西根交通大学根据谷歌、德尔福、奥迪三家拥有无人驾驶汽车行驶许可证的公司给出的数据,结合公开报道的交通事故,测算出了无人驾驶车与普通汽车的平均事故率。结果显示无人驾驶车卷入交通事故的比率要高于普通汽车,而这一结果也已经将未公开报道的事故考虑在内。
当然,研究者也承认,无人驾驶车这一方的数据量远远不如普通汽车,因此单纯比较事故率或许不是很有科学性。但有一点他们非常肯定,那就是,无人驾驶车卷入的事故几乎都是由普通车辆引起的。另外,在这些事故中,有73%的情况是,无人驾驶车是以低于5码的速度行驶,有时甚至是处于完全静止状态。
尽管如此,无人驾驶技术在安全方面也仍然有很多功课要做。根据谷歌无人驾驶技术项目主管克里斯·乌尔姆森(Chris Urmson)发布的一份报告,在谷歌为期14个月的测试中,无人驾驶系统曾出现272次罢工,不得不由人类驾驶员出手干预,另有69次是测试驾驶员主动接管,以确保行驶安全。不过,乌尔姆森表示,谷歌无人驾驶技术已经取得了很大的进步,并将继续在真实的驾驶环境中反复测试,以便无人驾驶车更好地理解毫无章法的人类世界。
面对安全性质疑,谷歌表示要好好学习天天向上
在谷歌内部,无人驾驶系统发生故障需要驾驶员亲自干预的状况被叫做“脱轨(disengagement)”。在过去的5个季度中,谷歌无人驾驶车的“脱轨率”正在不断下降,反映到数据上就是,每次“脱轨”前的行驶距离在不断上升。这或许是谷歌无人驾驶系统日益稳定的一个凭证。
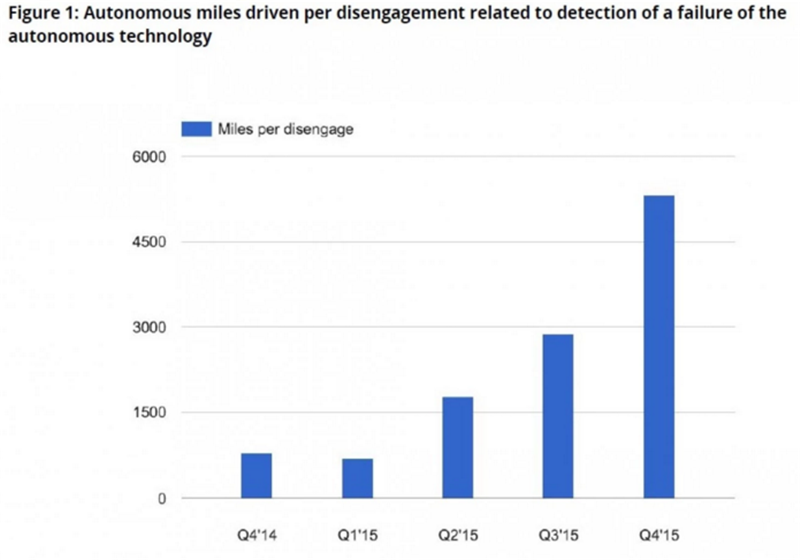
由系统罢工引起的每次“脱轨”前的行驶距离 来源:The Washington Post
当然,也有不少专家表示质疑。卡耐基梅隆大学致力于人机交互研究的Aaron Steinfeld教授说:“这些数据有一定借鉴意义,但不应该被当作衡量无人驾驶汽车安全性的指标。”质疑背后隐藏的忧虑,或许还是一个概率问题。谷歌们确实可以利用算法逐渐对各种常见的不规则驾驶情况做出防范,但引发意外的往往不就是那万分之一的可能么?
或许正是认识到了这一点,谷歌开始表现出一种要到现实生活中好好学习的态度。乌尔姆森的报告提到了谷歌无人驾驶车在实况测试中得到的几条经验,比如:不能指望人类司机用心开车,有人会边开车边看书,甚至还有吹小号的(什么鬼!),因此他们将传感器的监测范围扩展到了两个足球场那么大;十字路口抢行多,因此他们在算法中规定,绿灯亮后汽车应先作短暂停留,然后再发动;转弯路口常有奇葩,如抢行、逆向行驶,因此他们在利用传感器设置了“安全围墙(fence)”,一旦有车辆闯入这道围墙,无人驾驶车就会紧急制动。
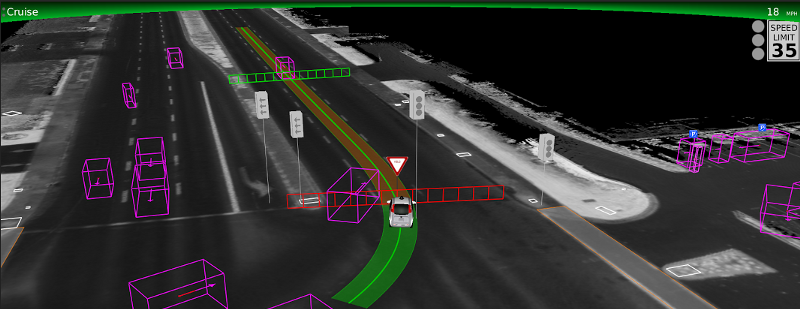 谷歌无人驾驶汽车“安全围墙(fence)”效果示意图 来源:Medium
谷歌无人驾驶汽车“安全围墙(fence)”效果示意图 来源:Medium
随着测试里程不断增加,这些细节的改进还会越来越多。当然,事故更是宝贵经验,于是,本着学无止境的精神,谷歌在月报中对此次撞车事故做出了最后总结:“(我们针对此次事故)及与之类似的上千种情况进行了模拟,并据此对软件做出了提升。从现在起,我们的汽车将更加深刻地理解,比起其他车辆,公交车(及其他大型车辆)是不太可能给我们让行的,我们衷心希望,在将来,无人驾驶车可以更恰当地处理类似状况。”

 06:36
06:36






 00:23
00:23
 08:30
08:30



 02:35
02:35
 02:14
02:14
 02:06
02:06
 13:23
13:23
 04:31
04:31
 02:28
02:28
 08:34
08:34


